Продолжаем цикл статей про построение систем роутинга со сложными требованиями на основе Open Source базы данных PostgreSQL и расширения PgRouting на карте OpenStreetMap. Сегодня мы поговорим о том, как добавить поддержку односторонних дорог (направлений движения). Зачастую, именно отсутствие этой поддержки является основной причиной смены PgRouting на другой "движок" маршрутизации. Как обычно, все данные и результаты доступны в моем GitHub репозитории OSM Routing Tricks, который я пополняю по мере публикаций.

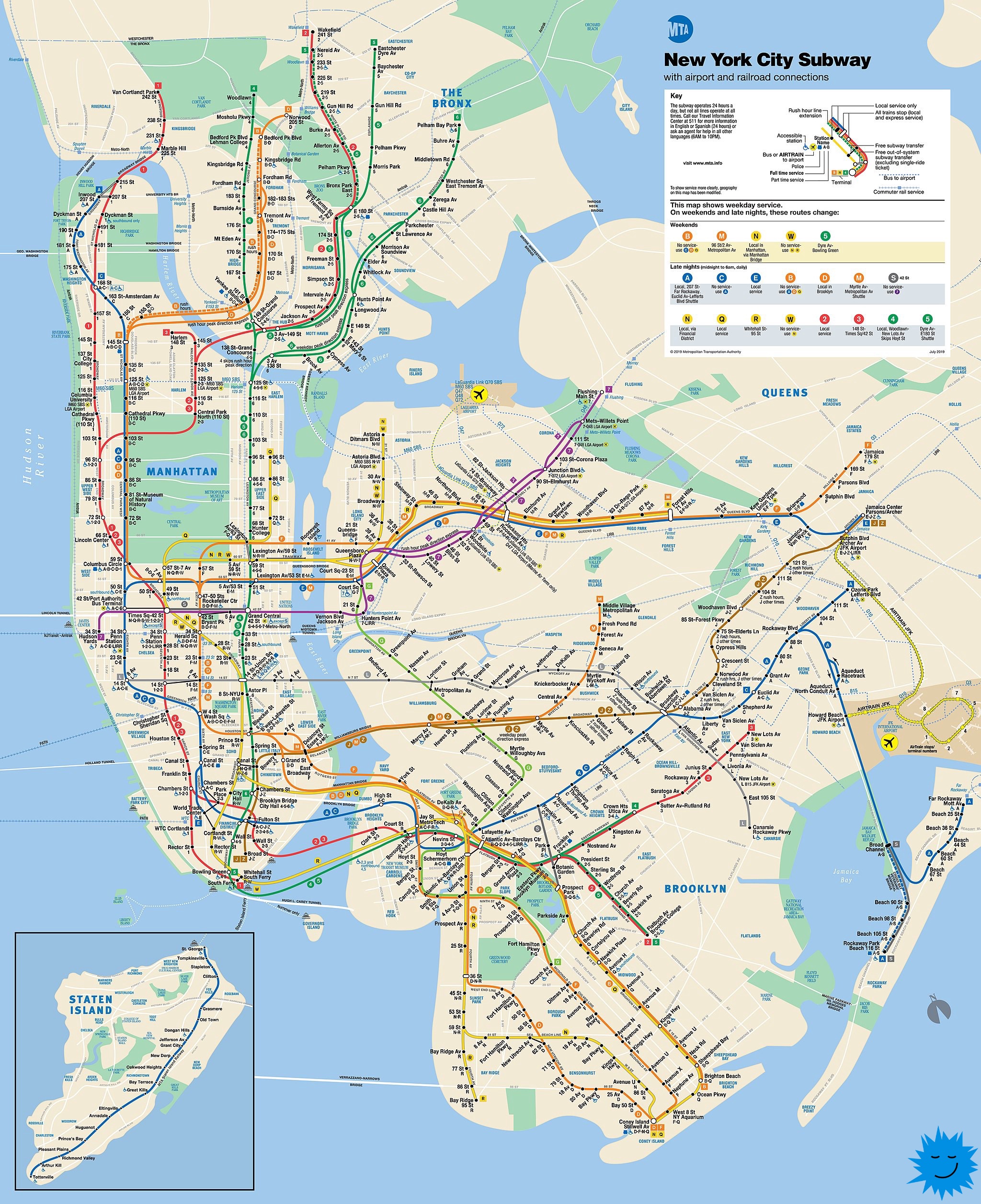
Небольшой маршрут из 330 адресов на карте OpenStreetMap.
Что такое односторонние дороги и зачем они нужны
В первую очередь, мы говорим об односторонних дорогах на карте,
то есть таких, по которым движение разрешено только в одну сторону.
Разумеется, двигаться по ним в другую сторону запрещено. Особенно
часто такое ограничение встречается на мостах, в туннелях и на
высокоскоростных шоссе, где движение в противоположную сторону
опасно для жизни. Разумеется, нам необходимо соблюдать направление
движения для автотранспортных средств, здесь не может быть
компромиссов. В то же время, для пешеходного роутинга это не
является обязательным, хотя и удобно двигаться по маршруту по
направлению движения автомобилей проще ориентироваться, можно
воспользоваться общественным транспортом или такси и т.п. Замечу,
что некоторые (многие, на самом деле) открытые системы роутинга
игнорируют это правило, то есть они подразумевают пешеходный
роутинг (по пешеходным дорогам и по окружающим не пешеходные дороги
тротуарам, которые могут и отсутствовать в действительности),
независимо от длины маршрута и наличия тротуаров в туннелях и на
скоростных шоссе.
Кроме того, поддержка односторонних дорог позволяет улучшить
маршрутную сеть заданные направления движения заметно упрощают
поиск оптимального маршрута за счет очень значительного снижения
количества возможных вариантов, можно учесть рельеф местности
(довольно трудно с грузом или без подняться по множеству ступенек
крутой лестницы, особенно, если можно вместо того спускаться по
ней) и принудительно сделать некоторые участки односторонними,
можно сделать односторонними виртуальные соединения между домами и
улицами (так что маршрут будет построен с последовательной
нумерацией, даже если он несколько раз проходит по одной улице
поскольку длина маршрута в таком случае не меняется, сам PgRouting
никак не гарантирует, что все адреса на такой улице будут посещены
в один и тот же проход по ней). И так далее, есть еще много
возможностей, доступных для роутинга с поддержкой направлений
движения.
Добавляем поддержку односторонних дорог в PgRouting
Официальная документация PgRouting для функции pgr_TSP Using Simulated Annealing approximation algorithm сообщает нам:
If using directed := true, the resulting non symmetric matrix must be converted to symmetric by fixing the non symmetric values according to your application needs.
Отлично, но в документации нет ни слова о том, как это сделать. Нам придется начать с теории и разобраться, возможно ли это и как именно это сделать. Англоязычная страница википедии, посвященная проблеме коммивояжера, содержит нужный нам раздел Travelling salesman problem: Asymmetric:
Solving an asymmetric TSP graph can be somewhat complex. The following is a 33 matrix containing all possible path weights between the nodes A, B and C. One option is to turn an asymmetric matrix of size N into a symmetric matrix of size 2N.
Здесь сказано, что решение задачи коммивояжера на асимметричной матрице расстояний усложняется, поэтому лучше превратить асимметричную матрицу в симметричную (ценой удвоения размера матрицы) и решать более простую симметричную задачу на симметричной матрице расстояний. Почти то же самое, что и в документации PgRouting, зато здесь объяснено, зачем же нужна именно симметричная матрица. Далее на этой же викистранице приводится алгоритм конвертации асимметричной матрицы в симметричную и пример конвертации простой матрицы. Идея простая каждый узел и каждое ребро заменить на два и задать такую матрицу расстояний между ними, чтобы полученный на такой матрице путь соответствовал искомому. Ниже мы рассмотрим этот пример из вики. К сожалению, графическое представление соответствующего графа я рисовал на листочках от руки и показать здесь не могу (почерк у меня как у физика, так что извините).
Пусть у нас задана асимметричная матрица весов:
| A | B | C | |
|---|---|---|---|
| A | 1 | 2 | |
| B | 6 | 3 | |
| C | 5 | 4 |
Ей соответствует следующая симметричная матрица весов:
| A | B | C | A' | B' | C' | |
|---|---|---|---|---|---|---|
| A | -w | 6 | 5 | |||
| B | 1 | -w | 4 | |||
| C | 2 | 3 | -w | |||
| A' | -w | 1 | 2 | |||
| B' | 6 | -w | 3 | |||
| C' | 5 | 4 | -w |
где -w это виртуальные соединения для виртуальных узлов, которые рекомендуется задать некоторым отрицательным числом, потому что
w=0 is not always low enough
Теперь мы можем написать соответствующую функцию-обертку для PgRouting. Поскольку PgRouting отбрасывает все отрицательные значения в матрице весов, мы используем нулевое значение (мы это компенсируем заданием очень высоких весов для запрещенных направлений) и добавляем еще [избыточные] ребра с очень высоким весом, поскольку PgRouting требует указания весов между всеми узлами матрицы (в теории этого не требуется, это просто техническое ограничение, которому нам приходится соответствовать).
CREATE OR REPLACE FUNCTION pgr_dijkstraSymmetrizeCostMatrix(matrix_cell_sql text, OUT start_vid BIGINT, OUT end_vid BIGINT, OUT agg_cost float)RETURNS SETOF RECORD AS$BODY$DECLARE sql text; r record;BEGIN sql := 'with edges as (' || matrix_cell_sql || ') select 3e9+start_vid as start_vid, end_vid as end_vid, agg_cost from edges union select end_vid, 3e9+start_vid, agg_cost from edges union select 3e9+start_vid, start_vid, 0 from edges union select start_vid, 3e9+start_vid, 0 from edges union select start_vid, end_vid, 1e6 from edges union select 3e9+start_vid, 3e9+end_vid, 1e6 from edges '; FOR r IN EXECUTE sql LOOP start_vid := r.start_vid; end_vid := r.end_vid; agg_cost := r.agg_cost; RETURN NEXT; END LOOP;END;$BODY$LANGUAGE plpgsql VOLATILE STRICT;
Однако, этого недостаточно. Дело в том, что PgRouting требует указания всех весов, а у нас в исходной матрице весов часть значений может быть пропущено, что приводит к ошибке роутинга
An Infinity value was found on the Matrix
Заполним все значения матрицы весов с помощью еще одной функции-обертки (можно было бы упростить pgr_dijkstraSymmetrizeCostMatrix() и не добавлять в ней избыточные ребра, но в таком случае при полной исходной матрице мы получим не полную итоговую матрицу, что, на мой взгляд, не есть правильно):
CREATE OR REPLACE FUNCTION pgr_dijkstraValidateCostMatrix(matrix_cell_sql text, OUT start_vid BIGINT, OUT end_vid BIGINT, OUT agg_cost float)RETURNS SETOF RECORD AS$BODY$DECLARE sql text; r record;BEGIN sql := 'WITH RECURSIVE src AS (' || matrix_cell_sql || '), dst AS ( select * from src where start_vid = (select start_vid from src group by start_vid order by count(*) desc limit 1) union select src.* from src, dst where src.start_vid=dst.end_vid ) select * from dst'; FOR r IN EXECUTE sql LOOP start_vid := r.start_vid; end_vid := r.end_vid; agg_cost := r.agg_cost; RETURN NEXT; END LOOP;END;$BODY$LANGUAGE plpgsql VOLATILE STRICT;
Теперь мы учли все требования PgRouting и можем работать с односторонними дорогами. Отмечу, что полученные обертки можно использовать и для симметричной матрицы, когда априори не известно, будет ли исходная матрица симметричной (хотя для симметричной исходной матрицы это приведет к не нужному ее увеличению и замедлению обработки).
Исходные данные
Мы используем все те же данные, что и в предыдущей части статьи плюс определенные выше дополнительные функции. Несколько расширенный скрипт load.sh из репозитория загрузит в базу данных PostgreSQL все необходимое.
Поиск оптимального маршрута для автомобиля
Поскольку для пешехода тротуары доступны в любом направлении, а для автомобиля одностонние дороги доступны лишь в одном направлении, необходимо указывать разные весовые функции для роутинга пешеходного и автомобильного. Как уже упоминалось ранее, наша дорожная сеть оптимизирована для автомобильного роутинга, о нем и поговорим. Итак, запретим (укажем очень большую длину миллион метров) движение в противоположном направлении. Ранее при подготовке дорожной сети мы разделили каждую дорогу на две, одна из которых (type='osm') совпадает с исходной и вторая (type='osmreverse') инвертирована. Соответственно, для односторонней дороги добавленная нами ее инвертированная копия должна быть запрещена для любого движения (вообще говоря, можно ее и вовсе не создавать, но тогда будет немного сложнее объяснить построение дорожной сети). Кроме того, для прямого движения должна быть доступна только исходная дорога (type='osm') и для обратного инвертированная (type='osmreverse'). В таком случае, итоговые прямая и обратная весовые функции имеют вид:
case when (type='osmreverse' and oneway) then 1000000 else length end as cost, case when type ilike 'osm%' then 1000000 else length end as reverse_cost,
где length геометрическая длина соответствующего сегмента дороги. Усложнив дорожную сеть (заранее исключив ненужные сегменты), можно взамен упростить весовые функции.
Построим оптимальный маршрут все для тех же случайных 330 адресов домов и с помощью функции PgRouting pgr_TSP() и добавленных выше функций pgr_dijkstraSymmetrizeCostMatrix() и pgr_dijkstraValidateCostMatrix(). Теперь мы можем использовать флаг directed=true, так как теперь мы добавили для pgr_TSP() поддержку односторонних дорог (точнее, симметризацию и заполнение пропущенных значений в несимметричной матрице, которая получается при наличии односторонних дорог). Как и ранее, в результате выполнения немного модифицированного SQL скрипта route.sql создается таблица "route" с сегментами маршрута для каждого заданного адреса, которую можно визуализировать с помощью программы QGIS. Файл проекта QGIS тоже обновлен, см. в репозитории route.qgs Полученная карта с маршрутом представлена на картинке до хабраката.
Смотрите на следующем рисунке участок построенного маршрута с порядковыми номерами посещенных домов (здесь черным цветом обведены односторонние дороги):

Проверим, что теперь по односторонним улицам движение выполняется только одну сторону и, притом, в требуемом направлении. Вот карта OpenStreetMap, на которой стрелками указаны направления движения по односторонним дорогам:

Как и указано на карте OpenStreetMap, в построенном маршруте движение выполняется слева направо для участка дороги с пунктами маршрута 329,330,331 на левой стороне дороги:

и в том же направлении (слева направо) для участка дороги с пунктами маршрута 72,73,74 на правой стороне дороги (второй проход по этому участку дороги):

Нумерация домов по сторонам улиц между перекрестками последовательная. Зачастую нумерация последовательная и после перекрестков (см. картинки выше). Таким образом, мы добились заметного улучшения качества маршрута, не меняя дорожную сеть и не занимаясь оптимизацией параметров функции pgr_TSP().
Что касается времени, затраченного на построение маршрута, оно увеличилось примерно втрое за счет добавления функций-оберток для поддержки односторонних дорог. Это было ожидаемо из-за увеличения матрицы весов.
Заключение
В этой статье мы улучшили возможности PgRouting, добавив к нему несколько своих функций. Теперь мы можем двигаться по дорогам в правильном направлении, что необходимо для построения реальных маршрутов и позволяет значительно улучшить итоговый маршрут, поскольку при этом количество возможных маршрутов кардинально снижается.
Если рассмотреть весь маршрут детально, то его еще можно улучшить, в том числе, с помощью оптимизации параметров функции pgr_TSP(). Но дело в том, что только путем оптимизации этих параметров подобного полученному выше результату добиться не удастся в самом деле, алгоритм оптимизации маршрутов PgRouting ничего "не знает" про наши предпочтения о последовательной нумерации и другие. Так что поддержка односторонних дорог, на самом деле, дает нам намного больше, чем можно было бы ожидать.
Можно ли добиться аналогичного результата с последовательной нумерацией зданий между перекрестками иначе, не увеличивая матрицу весов с соответствующим замедлением построения маршрута? Да, можно. Более того, можно еще и значительно ускорить построение маршрута (например, на один-два десятичных порядка), в том числе, с учетом односторонних дорог. Об этом мы и поговорим в следующий раз.