

Но с появлением Raspberry Pi Pico связано не только радостное возбуждение разработчиков электроники. Это событие заставило сообщество задаться важным вопросом о том, окажет ли появление платы какое-то ощутимое влияние на тех, кто пользуется STM32, SAM и другими микроконтроллерами, основанными на Cortex-M. Станет ли микроконтроллер RP2040 жизнеспособным выбором для некоторых из проектов, в которых используются похожие MCU? Учитывая то, что в состав RP2040 входит двухъядерный процессор ARM Cortex-M0+, кажется справедливой идея использования этого микроконтроллера там же, где применяются 32-битные MCU от ведущих производителей компонентов такого рода, в частности, от STMicroelectronics.
Сможет ли небольшой проект Raspberry Pi Foundation показать инженерам STM как надо делать микроконтроллеры, или создателям платы на RP2040 стоит пересмотреть некоторые из своих гипотез? Сложно ли будет портировать на RP2040 низкоуровневый код, рассчитанный на STM32?
Сложно ли перенести STM32-проект на RP2040?
Короче говоря, когда я обратила внимание на RP2040, мне подумалось, что будет интересно попытаться портировать на новый микроконтроллер мой C++-фреймворк для STM32. Правда, эта идея меня заинтересовала не из-за двухъядерного ARM Cortex-M0+. У меня есть двухъядерные микроконтроллеры STM32H7 (M4 и M7), которые, за счёт более совершенных характеристик, легко обойдут RP2040. Сильнее всего меня заинтриговали программируемые модули ввода-вывода RP2040, возникало такое ощущение, что они достойны того, чтобы познакомиться с ними поближе.

Плата Raspberry Pi Pico, основанная на RP2040 подключена к одноплатному компьютеру Raspberry Pi, играющему роль SWD-адаптера (оригинал)
Основываясь на опыте работы с STM32 я поняла, что смогу быстро портировать некоторые файлы, создав в репозитории проекта ветку RP, рассчитанную на другую архитектуру, и принявшись за дело. Ведь и в основном проекте, и в новой ветке код будет рассчитан на Cortex-M. Обычно работа с новым ARM-микроконтроллером заключается в том, чтобы найти даташит, справочное руководство и CMSIS-файлы для соответствующего устройства. А потом существующий низкоуровневый код можно легко адаптировать под новый подход к именованию периферийных устройств и под новую схему регистров, учитывая то, что фундаментальные компоненты нового и старого микроконтроллеров (SysTick, NVIC и так далее) ничем не отличаются.
Может, я поступила слишком опрометчиво, но я заказала плату Raspberry Pi Pico, даже не поинтересовавшись тем, есть ли для неё CMSIS-файлы, и даже не взглянув в справочное руководство по ней. Позже я, к своему удивлению, выяснила, что пока нет даже и речи о наличии CMSIS-файлов для Raspberry Pi Pico, или хотя бы о возможности взаимодействия RP2040 с другими устройствами из экосистемы Cortex-M. Но при этом SVD-файл для MCU RP2040 имеется в Pico SDK, а на основе этого файла можно создать заголовочный файл для устройства. Благодаря проекту cmsis-pi-pico в моём распоряжении, в итоге, оказалось рабочее решение.
Решение моей задачи можно было бы и упростить
Для того чтобы низкоуровневый программный проект завёлся бы на целевом MCU, при работе с STM32 нужно решить несколько задач. В них входит подготовка загрузочного кода, который выполняет некоторые простые настройки рабочей среды и таблицы векторов прерываний, содержащей адреса функций обработчиков прерываний.

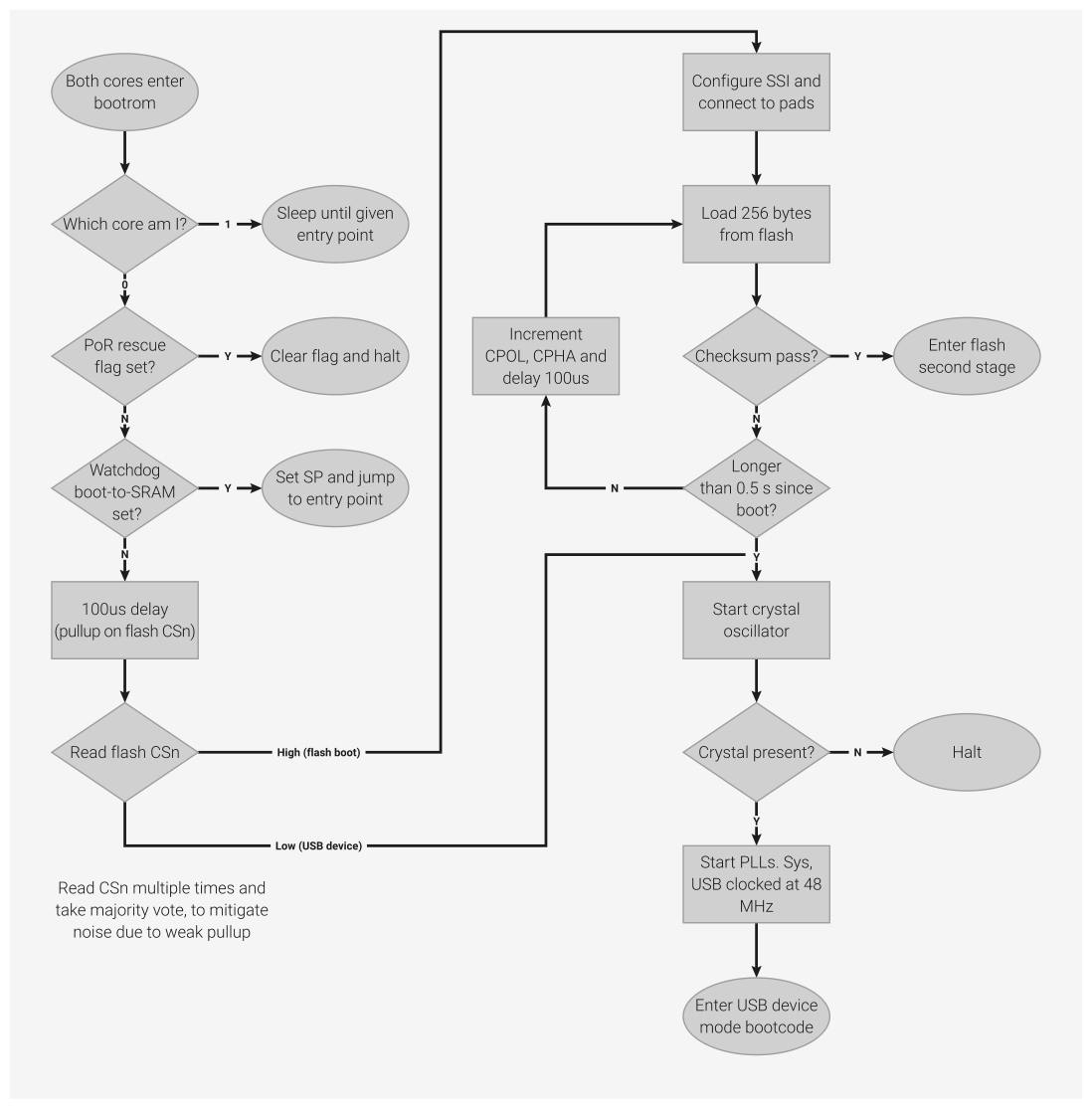
Последовательность загрузки RP2040 (даташит RP2040, рисунок 15) (оригинал)
Есть ещё и скрипт компоновщика, который позволяет обеспечить нахождение в памяти всех необходимых битов по правильным смещениям. Всё это представляет собой достаточно скромный набор задач при работе с MCU, в котором выполняется загрузка образа прошивки, находящейся во Flash ROM по адресу, используемому по умолчанию.
Первая сложность, которую нужно было преодолеть для того чтобы научиться работать с RP2040, заключалась в понимании особенностей цепочечного процесса загрузки микроконтроллера. Тут всё очень похоже на то, как в прошлом, на обычных компьютерах, была организована загрузка с дискет, или то, как устроена загрузка с HDD/SSD. А именно внешняя QSPI Flash ROM рассматривается MCU лишь как устройство, которое, возможно, содержит загрузочные данные. Загрузчик первой фазы загрузки интегрирован в MCU и располагается в ROM по адресу 0x0000 0000. Он обращается к интерфейсу QSPI и пытается загрузить из него 256 байт данных. Потом будет проверен CRC32-хеш этих данных. Если проверка пройдёт успешно, они будут признаны загрузчиком второй фазы загрузки.
Загрузчик второй фазы может решать множество задач, при этом некоторые задачи он должен решать в обязательном порядке. Этот процесс, реализованный в RP2040, если сравнить его с аналогичным процессом в некоторых знаменитых клонах STM32, тоже имеющих SPI ROM (вроде отличных клонов компании GigaDevice), не так понятен, не так хорошо документирован, не так прозрачен, как мог бы быть. В нём много такого, в чём можно запутаться.
Говорят, что хорошие художники копируют
У меня ушло достаточно много времени на то, чтобы понять, как подход к управлению тактированием периферийных устройств, принятый в STM32, соотносится с системной архитектурой RP2040. Я внимательно читала даташит RP2040 и всех вокруг спрашивала об этом. Как оказалось, RP2040-версия системы управления тактированием периферии называется
RESETS. Эта система является полной противоположностью
той, что применяется в STM32. А именно, нужно установить условие
сброса периферийного блока в 0 для того чтобы включить его
тактирование. Так, чтобы включить тактирование GPIO, нужно
переключить бит 8 в RESETS_RESET
(PADS_BANK0).
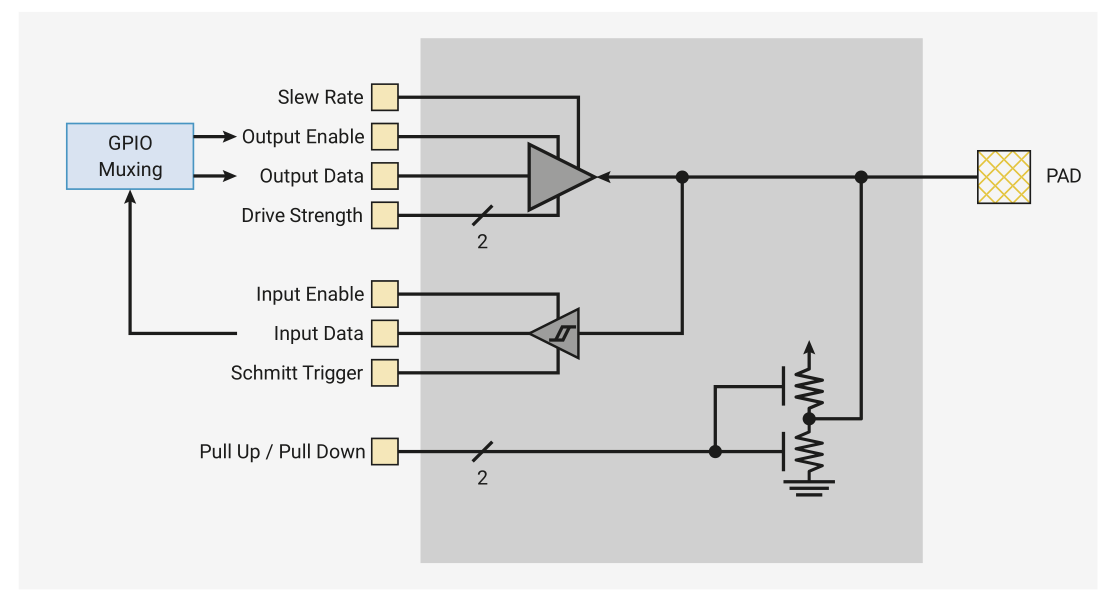
Функциональная схема GPIO-пина RP2040 (оригинал)
Когда я это поняла, я посмотрела раздел документации по GPIO-периферии (раздел 2.19). И кое-что тут же бросилось мне в глаза. А именно, то, что я там увидела, совершенно не похоже на то, как устроена практически вся GPIO-периферия, с которой я когда-либо сталкивалась. В частности, речь идёт о периферии STM32, AVR и SAM.
В то время как большинство чипов имеет один или два регистра на функцию, и в них помещают биты для активации соответствующей функции для конкретного пина, у RP2040 имеется по регистру на каждый пин. В эти регистры надо помещать биты, указывающие на нужные функции. Это уникальное решение. Мне пришлось самой написать кое-какой код для того чтобы выяснить адреса памяти управляющих регистров для каждого пина.
А теперь, когда я через всё это прошла, полагаю, можно будет просто переписать мой код, после чего он заработает на RP2040?
Причуды загрузки
Как уже было сказано, загрузчик второй фазы загрузки должен быть расположен в начале образа прошивки. Я считала, что это должен быть какой-то достаточно стандартный код, поэтому просто взяла готовый ASM-код, который выдал официальный Pico SDK, и использовала его при сборке примера Blinky. Добавив этот код к RP2040-порту моего проекта Nodate, я смогла без проблем собрать Blinky.
Запись результирующего ELF-бинарника в RP2040 стала ещё одним приключением. Дело в том, что на плате Raspberry Pi Pico нет встроенного SWD-адаптера, чего-то в духе ST-Link. А микроконтроллеру на двухъядерном Cortex-M нужен могоканальный SWD-адаптер. Единственным подобным устройством, которое было у меня под рукой, оказался адаптер, интегрированный в плату Nucleo-STM32H7. Поэтому я решила использовать кастомный форк OpenOCD, созданный Raspberry Pi Foundation. Его я запустила на Raspberry Pi.
После столь основательной подготовки мне удалось успешно прошить RP2040, но ничего не заработало. Беглая проверка вызвала у меня такое ощущение, что в ходе загрузки мне не удалось выйти за пределы исходного загрузчика и добраться до прошивки, находящейся в SPI ROM. Сейчас мне сложно дать ответ о причинах происходящего. Это могла быть проблема с ASM-кодом второй фазы загрузки, это могла быть ошибка в экспериментальных CMSIS-файлах RP2040, которые создавала не я. Это могло быть и что-то совершенно иное.
Продолжение следует?

Raspberry Pi Pico (оригинал)
После того, как я потратила много часов на то, чтобы завести RP2040 с использованием CMSIS-файлов и файлов загрузчика второй фазы загрузки, мне кажется, что можно немного отстраниться от ситуации и переоценить происходящее. А именно, с того момента, когда начинала формироваться моя точка зрения на Raspberry Pi Pico, в запросе по поводу CMSIS-файлов появились сведения о том, что официальные CMSIS-файлы, возможно, появятся в Pico SDK 1.2.0. Это довольно-таки приятно.
Полагаю, любому, кто хочет поближе познакомиться с RP2040, пользуясь инструментами, ставшими индустриальным стандартом, имеет смысл дождаться этого релиза Pico SDK. А после того, как в моём распоряжении окажутся официальные CMSIS-файлы, я, вероятно, начну с переделывания примера Nodate Blinky, а потом попробую поработать с PIO. Перспектива создавать собственные интерфейсы кажется мне весьма привлекательной. И хотя возможности Raspberry Pi Pico не так мощны, как возможности CPLD или FPGA, они, всё равно, способны лечь в основу интереснейших проектов.
Возникает такое ощущение, что авторы даташита для RP2040 (он, скорее, похож на смесь справочного руководства и даташита) иногда забывают о том, что в нём должно быть описание микроконтроллера, а не чего-то другого. В эти моменты он превращается в учебное руководство по Pico SDK. Хотя материалы этого даташита и способны принести пользу тем, кто стремится освоить Pico SDK, тем, кто хочет написать что-то своё, пользы от него, однозначно, меньше, чем от более привычного даташита.
Полагаю, тех, кто захочет написать для Raspberry Pi Pico что-то своё, не особенно порадуют такие особенности платы, как запутанная работа с GPIO-периферией, сложный процесс загрузки, необходимость в загрузчике второй фазы загрузки, непрозрачность внешней ROM. В общем тому, кому интересна плата Raspberry Pi Pico, пока приходится ориентироваться на официальный SDK.
Конечно, я не исключаю возможности того, что если некто как следует привыкнет к особенностям платы, то всё в ней будет казаться ему довольно-таки логичным и удобным. Или, возможно, решение проблем, подобных тем, с которыми столкнулась я, это лишь вопрос времени, вопрос встраивания поддержки RP2040 в стандартные наборы инструментов. В конце концов, каждый новый микроконтроллер перед его эффективным использованием приходится некоторое время изучать.
Пользовались ли вы Raspberry Pi Pico?














{kind=link}
{kind=link}
{kind=link}
{kind=link}