Habritants! Я хочу поделиться с вами
размышлениями "об общем, так сказать, геометрическом характере нашего
мира" ( А.А. Фридман), начиная с самого днища с философии, и
постепенно выгребая к свету. Гипотеза сырая, буду благодарен за
любую конструктивную критику и идеи.
Мир не плоск!
Совсем не плоск!
Пролог
Давным-давно, когда Земля была ещё плоской, любое место в
ойкумене можно было задать двумя координатами
направлением и расстоянием.
Затем Аристотель, глядя на звёзды, нашёл там
доводы в пользу шарообразности нашего мира.
Позже Страбон, наблюдая уходящие к горизонту корабли, обратил
внимание на то, что в перспективе они не сжимались в точку, но
первым скрывался корпус, паруса же оставались ещё видны. Не менее
гениально.
Ещё позже Ариабхата, который также одним из первых, ещё в шестом
веке, предположил, что Земля и планеты вращаются вокруг Солнца,
весьма точно оценил размеры нашей огромной планеты.
Которая оказалась такой крохотной теперь, когда мы задаём
точки-события четырьмя координатами, и вновь считаем пространство
псевдо-евклидовым (плоским), а свет (море) прямым, потому что вдали
от водоворотов сумма углов треугольника 180. Как в треугольнике,
начерченном палкой на песке той бухты, где стоял Страбон.
Что-то во всём этом не давало мне покоя, и я решил основательно
озадачиться вопросами мироустройства, в результате чего, пока СУБД
на моём ноуте аккуратно обсчитывает данные для следующей
статьи
из серии про космологическое красное смещение, пишу эту заметку
с идеями о структурном устройстве мира.
Макропредпосылки
Насущная необходимость пересмотра философской и, следовательно,
физико-математической базы для модели Метагалактики для меня
очевидна. Ей прощают всё больше и больше, затыкая новые дыры
тёмными словами. Давайте вспомним, что в рамках существующей
-CDM-модели не объясняются:
- Тёмная энергия. Некая сила тянет Метагалактику в
разные стороны. Как стало известно с ускорением. А возможно, и нет.
Сила невидимая, явление необъяснимое.
- Тёмная материя. Некая материя присутствует в
недрах многих галактик, влияя на характер их вращения. Материя
невидимая, явление необъяснимое.
- Тёмный поток. Множество галактик движутся в одну
сторону. Внятное объяснение отсутствует.
- Изотропность реликтового излучения и наличие Великих стен противоречат друг другу.
- Зависимость расширения пространства от
гравитационной связанности объектов. Объяснение
отсутствует.
- Характер экспансии пространства Метагалактики изменяется.
Механизм и принцип его изменения не объясняются моделью.
- Постоянные расхождения в определении постоянной Хаббла для
различных способов и исследуемых групп объектов.
Тот факт, что модель называется в честь явлений, которые не может
объяснить, кажется весьма занимательным.
Недавно появилась новость о
расхождениях в скорости расширения разных областей
наблюдаемой части Метагалактики.
Есть вероятность, что проблема не в недостатке новых, более точных
и развёрнутых данных, а в неверном трактовании существующих. В
ошибочном понимании физических зависимостей, происходящем от
скупости теоретических моделей.
Микропредпосылки
Со студенческой скамьи я поражался тому, что никто не смотрит в
направлении разрешения принципа квантовой неопределённости через
увеличение мерности пространства. Ведь если нечто вращается в
четырёх измерениях подобно гироскопу (вращается ось вращения), то в
трёхмерном срезе угадать, где оно в следующий момент его проколет,
практически невозможно, не зная пространственной глубины центра
вращения и радиусов вращений первого и оси.
А ведь может вращаться и ось вращения вращения и центр бродить, где
тогда искать эту точку, которая на самом деле вовсе не точка, а
область?

Постройте произвольно плоскость, выберите точку на внутренней,
красной рамке и постарайтесь построить зависимость её движения по
точкам, в которых та пересекает плоскость.
А теперь добавьте ко всей системе ещё одну размерность ещё одну ось
вращения и вместо плоскости рассекайте пространством. Да
представьте, что оно не очень плоское.
Да! И дополнительных измерений может быть несколько
С тех пор мои взгляды несколько изменились, но, по-прежнему,
включают увеличение мерности пространства. Вероятностный характер
всей квантовой механики от волновой функции до эффективного сечения
столкновения может быть объяснён, например, через парадигму
абсолютно упругой не вязкой многомерной (

) жидкости (далее
осциллятор), в которой фундаментальные частицы являются
возмущениями: волнами колебаниями гиперповерхности осциллятора при
перемещении, но квантами в процессах преобразования и поглощения,
так как могут участвовать в них только полной мерой своей энергии,
вследствие упругости осциллятора.

Тогда постоянная Планка определялась бы величиной предельной
дискретизации осциллятора (как на гифке выше величина колебания не
может быть меньше величины зерна), а принцип неопределённости
возникал бы вследствие невозможности поймать все значения волны по
наблюдению трёхмерного среза, когда колеблется область
пространства.
При этом, предвосхищая скептические замечания наиболее искушённых в
квантовой механике читателей о многочисленных опытах, однозначно
разрешающих
неравенства Белла в пользу значений,
предсказанных квантовой механикой, замечу, что теория наличия
дополнительных измерений это, в принципе, теория
нелокальных
параметров: любое возмущение трёхмерной гиперповерхности
относительно 4+ измерения может быть связано, чисто теоретически, с
бесконечно удалённой точкой этой же трёхмерной
гиперповерхности.
Множество явлений квантовой механики с введением четвёртого
измерения становятся проще и понятнее:
- Квантовая неопределённость при наличии
дополнительного измерения, в котором могла бы колебаться
гиперповерхность, становится вполне интуитивно понятным явлением,
возникающим вследствие невозможности предсказать и определить
траекторию и прочие характеристики явлений в n-мерном пространстве
по наблюдению их поведения в трёхмерном срезе, который является
своего рода разделом фаз.
- Эффективное сечение появляется в результате
того, что совпадающие в трёх измерениях результирующие действия
(проекции) частиц-колебаний не гарантируют их взаимодействия по
причине их взаимного отклонения в четвёртом и более.
- Туннельный эффект простое огибание барионного
барьера относительно лёгкой частицей-колебанием, посредством
большего радиуса её движения в четвёртом измерении. И отражение
обратно в случае попадания на барьер и отскока.
- Квантовая запутанность наличие связи
(взаимодействия) между частицами-субъектами в дополнительном
измерении.
- Обязательность несовпадения спина и наличие минимального порога
энергии при явлении рассеяния фотона на фотоне, если
интерпретировать колебания фотона буквально как вращение некоторой
среды, выступают характеристиками этого вращения, и совпадающие по
спину фотоны, имея единое направление вращения, проходят друг
сквозь друга с большей вероятностью, а фотон низкой энергии имеет
слишком редкие витки для обеспечения высокой вероятности
столкновения.
Сферическая форма распределения вероятностей обнаружения электрона
в атоме водорода, например, по сути может просто описывать
вероятность присутствия пика волны в определённом месте трёхмерного
пространства в определённое время по причине наличия неизвестных
компонент угла и радиуса её колебания в дополнительных
измерениях.
И несоблюдение закона сохранения энергии в микро и макро масштабах,
как, например, потеря энергии фотона при растяжении пространства (в
рамках стандартной космологической модели), можно было бы объяснить
перераспределением энергии фотона между движением по видимым осям и
с участием невидимой оси, которое можно лишь косвенно угадывать в
его трёхмерных проявлениях.
Множество эффектов квантовой механики, кажущихся сложными и
контринтуитивными в трёхмерном пространстве, предстаёт достаточно
тривиально объяснимыми при дополнении наблюдаемой реальности
дополнительными измерениями.
По сути, вся квантовая механика является продуктом фиксации
наблюдений, начиная с основ волновой функции Шрёдингера, и никаким
образом не объясняет значительного изменения природных принципов
при переходе к масштабу фундаментальных частиц.
Когда я был студентом, у меня не было Интернета, чтобы знать обо
всех физических и космологических теориях, но как выясняется
теперь, я поражался совершенно не зря. В направлении дополнительных
измерений мысли были и есть, но настолько мало прижившихся, что они
легко уложатся в небольшой исторический экскурс в рамках настоящей
статьи.
Хроники четвёртого измерения
Одним из первых идеей четвёртого измерения заразился британский
математик
Чарльз Говард Хинтон, давший название 4-мерному
кубу
тессеракт и плотно занимавшийся
темой четвёртого измерения, в отрыве, однако, от
нашего бренного мира. Исключительно с математической точки зрения.
Но даже в таком виде эту тему потом немного эксплуатировали
Лавкрафт и Хайнлайн.
Это прекрасная демонстрация проекции вращающегося 4-куба на
3-пространство:

Следом за ним, в 1884 году, некто
Эдвин Эббот Эббот публикует роман
Флатландия. Наверное, можно сказать, что это
руководство для плоского ума к пониманию пространства. Хоть и
задумывался он немного о другом, английским писателям в целом
свойственна такая особенность становиться популярными у читателя,
на которого не рассчитывали.
Первым серьёзным разработчиком темы стал
Гуннар Нордстрём, сформулировавший в 1914-ом
году альтернативную теорию тяготения, построенную на метрике (1,4),
одно измерение времени и четыре измерения пространства. Теория не
подтвердилась экспериментально.
Чуть позже на базе такой же метрики была построена теория
Теодора Калуцы.
Так пишет о его теории
Митио Каку в своём опусе
Гиперпространство, вдохновившем
Muse на
альбом
Origin of Symmetry, который я весьма долго слушал
кругами, и который созвучен названию данной статьи. Всё
сходится.
Коротко о теории просто вставить
четыре величины, полностью описывающих
электромагнитное поле, расширив мерность метрического тензора
на единицу.
Так широко в то время тензор растягивать было не принято, поэтому
случай зафиксировался в анналах истории.
А вслед за этим
Оскар Клейн сформулировал гипотезу, согласно
которой дополнительное измерение может быть ненаблюдаемым
вследствие его компактификации.
Однако, и эта теория не подтвердилась, и дополнительные измерения
заехали в архив до семидесятых годов двадцатого века, когда
получила распространение теория струн. Я не буду даже ссылку здесь
ставить: сам Шелдон Купер занимался теорией струн.
По результату моего поверхностного ознакомления с теорией, суть её
в том, чтобы переложить загадки микро масштаба мироздания из
физического кармана в другой геометрический и там попробовать их
разгадать. Всё ещё тщетно, что, в общем-то, показательно.
Это все из известных мало-мальски значимых изысканий в направлении
увеличения мерности пространства.
Коротко о философии
Коротко о философии это, конечно, оксюморон. На этом аспекте
принято останавливаться томами и годами. Я же здесь постараюсь быть
максимально лаконичным. Самый хороший вид философии математика, ей
будет посвящено гораздо больше букв и знаков моей жизни, но для
общего понимания взглядов будет полезно ознакомиться с ними от
самых истоков.
Коротко охарактеризовать мой подход можно как модернизированный
механицизм на фоне идеализированного детерминизма и тотального
эволюционизма.
Унисофия
Олдскульный
механицизм, сторонниками которого были, среди
прочих, Ньютон, Галилей и Лаплас, постулирует явные анахронизмы,
связанные с отсутствием представлений о некоторых теориях,
возникших позже: вроде неделимости и цельности атомов и
независимость времени; и неявные анахронизмы, которые ещё только,
возможно, предстоит разрушить существование пространства как
самостоятельного объекта физики.
Но, как видно из описания осциллятора, сам подход мне близок в
части наличия зерна. В части попытки объяснения полей через
механистические процессы, происходящие в областях, скрытых от глаз
и современных инструментов homo sapiens, что эквивалентно: в
областях, находящихся вне фотонного слоя. Ведь, очевидно, если
фотоны согласно своей некоторой внутренней особенности формируют
консолидированную трёхмерную гиперповерхность n-мерного
пространства, мы просто не увидим всё, что на-под ней.
Итак, механицизм, пусть даже развитый дополнительными измерениями,
но всё же сохраняет свою страшную порочную связь с
детерминизмом, который наверняка являлся ночами
множеству учёных мужей в облике
демона Лапласа как осознание абсолютной
бессмысленности бытия в такой парадигме. Если всё предопределено
начальным состоянием системы, и результат может быть рассчитан ещё
до начала, то: Зачем?!.
Непосильные муки жрецов классических точных наук длились долго, до
1926 г., пока Шрёдингер не опубликовал своё уравнение. Проклятие
было снято в микро масштабе результат до события неизвестен,
Вселенная катится в неизвестном направлении, от нас, человечества,
возможно, что-то зависит. Ура.
Введение осциллятора как тотально детерминированной субстанции в
таком контексте означало бы новый виток самоуничижительной
рефлексии. Если бы не наличие, во-первых, небольшой вероятности
того, что у человека всё-таки есть право выбора, не определяемое
его генами и обстоятельствами. Я бы сказал, что в таком случае,
именно это и было бы определяющим фактором наличия сознания.
Тогда группа развитых существ могла бы помещать комплексный
исходник, представляющий совокупность их собственных черт, в
специальной пустой зоне для выращивания нового развитого существа.
Так наша Вселенная, например, в результате развития и
симбиотического объединения интеллектов электронной и биологической
природы, постепенно агрегирующих неживую материю для формирования
себя как единого целого, то есть являя собой процесс становления
чего-то в макро масштабе, может в современном состоянии
представлять собой аналог
зиготы.
И даже от этой мыслительной конструкции всё ещё очень тянет
человечиной. Стоит облечь этот скетч в художественную форму?
Во-вторых, наша реальность может быть этим самым просчётом
результата. Да, это инвариант представления Вселенная сон Будды, но
в сочетании с идеей эволюции он играет новыми красками: Вселенная и
есть Будда. Вселенная и есть демон Лапласа.
Кроме того, что славянское быть/будь имеет те же этимологические
корни в
праиндоевропейском языке, что и имя Будда на
санскрите, отражая в том числе его суть: существовать.
То есть Вселенная существует, потому что может. И развивается, и
эволюционирует, потому что может. Потому что знать результат, и
идти к нему это совсем не одно и то же. Тем более, что будучи
машиной для определения результата, внутри себя Вселенная результат
никогда не осознает.
Кстати, идея с дорогой и целью интересно представлена у Э. Фрома в
Иметь или быть как разница западного и восточного менталитетов. Мне
было очень полезно для личностного роста.
Но вернёмся в колею. Я назвал свой детерминизм идеализированным,
потому что материальный мир можно представить проекцией мира идей.
И наоборот. Они как бы взаимно сочленены таким образом, что материя
является формой выражения идей, а идеи эволюционируют через своё
материальное представление.
Можно условно представить пространство идей как 0-мерную область
все идеи транспарентны из любой точки пространства. А материальное
пространство имеет размерность сущностей, которые его заполняют,
являясь проекциями идей.
Если представлять эволюционное древо идей как граф, то у него есть
начальная точка, к которой всё сходится. Базовая, единственная,
первая, самая простая идея.
Поэтому весь изложенный концепт я назвал бы унисофией.
Эволюция материи
Многие, наверняка, в своих философских изысканиях натыкались на
мысль об относительности макро и микро масштабов. Что нашими
атомами могут быть чьи-то галактики, и наоборот мы можем
существовать в сопле титана.
Относительность времени накладывает на эту мысль дополнительный
флёр. Для титана длительность нашей Вселенной промежуток времени от
попадания заразы в респираторную систему до сморкания.
Однако, эта блестящая мысль находится в противоречии с другим
параметром. Сложность.
Микро и макро масштабы различны не только размером, но и
количеством возможных форм и их взаимодействий. Семнадцать
фундаментальных частиц и три способа взаимодействия

100+ химических элементов и
усложнение взаимодействий (валентность, дисперсионное притяжение)
молекулы и структурная
(пространственная) организация
клетки и вещественный обмен
организмы и нервные системы
сознание и интернет
искусственный разум и
информационная интеграция
???
На среднем уровне, хорошо просматриваемом с помощью технических
инструментов современного человечества отчётливо видно увеличение
индивидуальности объектов с возрастанием масштаба. Их
усложнение.
Их эволюция на базе простейших способов взаимодействия возникают
всё более сложные, включающие в себя базовые, но на новый лад, в
комбинациях.
И если ретроспективно проследить это развитие, видно, что
количество типов объектов и взаимодействий уменьшается, организация
упрощается.
Кроме того, фундаментальные взаимодействия, известные в настоящее
время, можно структурировать следующим образом:
- Гравитация. Однополярное взаимодействие.
- Электрослабое. Двухполярное взаимодействие.
- Сильное. Трёхполярное взаимодействие.
При этом известные фундаментальные частицы последовательно
наследуют способность участия во всё более сложных взаимодействиях
от первого к третьему (исключая, разве что глюоны, которые, вообще
говоря, вместе с кварками явления в себе, то есть без них и кварки
в электрослабых участвовать не будут).
Заметки на полях. Если электромагнитное и
гравитационное взаимодействия являются взаимодействиями разного
типа, то почему нет заряженных безмассовых частиц?
Если ретроспективно продолжить идею эволюции материи к самым
истокам, то в основании мы должны получить некоторую пару явлений,
происходящих от одной причины, и образующую фундаментальную
дихотомию. Своего рода Инь-Ян.
Такой вот получается анзац: все три вида фундаментальных
взаимодействий это одно и то же взаимодействие с разным
геометрическим ключом (для различных конфигураций движения, см.
гравитомагнетизм).
Эволюция идей
Вместе с тем, уменьшение количества типов объектов и их
взаимодействий означает упрощение идей, материальными проекциями
которых они являются. Тогда сами эти идеи, по мере приближения к
основанию мироздания, должны становиться проще, нисходя до той же
пары, а затем и одной.
Подтверждение такого умозаключения можно найти в повторяющихся
базовых идеях на разных уровнях организации материи, но в разных
вариациях. В нас самих, людях, стремление к изменениям, новым
свершениям борется со стремлением сохранить достигнутое, как
реформаторство и консерватизм, как мужское и женское начало, как
маскулинный и фемининный признак, как прямая и вращение.
В то же время идеи борются между собой через свои материальные
проявления. Например, развитие сущностей происходит несколькими
путями деление, слияние, поглощение.
Деление занимает свои ниши у простейших организмов, но сама идея
начинается весьма близко к началу с фотонов. Слияние больше
применимо к более сложным объектам, но начинается там же в
фундаментальной основе. Как и поглощение.
Если абстрагироваться от обыденного порядка вещей в достаточной
степени, можно заметить, что он не единственно возможный порядок.
Чтобы двигаться дальше вглубь, необходимо понимать, что существо с
рядом оголённых костных образований вокруг отверстия, в которое
необходимо регулярно вливать оксид водорода и помещать органические
соединения для продолжения жизнедеятельности не норма, а только
один из возможных вариантов. И уж точно не венец творения.
Я это к тому, что вокруг нас огромное количество обыденных явлений,
каждое из которых является выражением идей, подсказкой.
Так, например, разделение множества организмов на два пола созвучно
электрослабому взаимодействию (двухполярное взаимодействие). Но в
то же время уже включает в себя как вариации гомосексуальность
(однополярное) и полиаморность (двухполярное плюс валентность).
Или сам факт получения энергии извне через поглощение других
сущностей это вполне рациональное явление, происходящее от
повышения концентрации энергии на каждом из уровней переработки
солнечной от планктона до льва. Но идея такого механизма также
могла и, вероятно, сложилась эволюционно.
В основании, предполагаю, будет идея о несуществовании. Идея
смерти. Она пронизывает всю Вселенную насквозь, проявляясь в каждой
её пылинке.
Потому что для осознания собственного существования, необходимо
принятие идеи небытия: раз, чтобы прекратить существовать, надо
быть, то чтобы
быть, надо сперва не существовать. И
это вроде бы так интуитивно понятно, но одним из возможных
следствий этого является: "
Всё возникло из
Ничего". А
это уже не выглядит таким уж бесспорным.
Если вам нравится эта, более художественно-философская сторона,
моих ментальных странствий, то здесь больше
Бионический человек.
В этой же статье вернёмся к прикладной стороне. Языком в
пространстве идей является математика. Для меня очевидно, что
дальнейшее углубление в понимание мира, в котором мы живём,
возможно только на языке его прошивки.
Математика как вселенский ассемблер
Это работает в две стороны. С одной явления наблюдаемого мира могут
быть описаны знаками, символизирующими объекты, процессы и их
характеристики. С другой (это предположение) любое рациональное
развитие таких знаковых комбинаций является идейным основанием
реально существующих явлений.
То есть, я подразумеваю, что математика это язык, на котором
философская парадигма Вселенной может быть наиболее точно выражена,
потому что математика это язык идей, а Вселенная их материальное
выражение. И это само по себе совершенно не ново, но дополнительная
нота в этом аккорде поиск физико-философского смысла в привычных,
простых, но пока весьма абстрактных математических формах, таких
как, например:
- Длина отрезка в n-мерном пространстве определяется суммой
квадратов проекций на оси. Это, в общем-то, следствие
теоремы Пифагора. Почему форма именно такова?
- Что является фундаментальным основанием тригонометрического
представления (
 ) гармонического
колебания?
) гармонического
колебания?
- Как Чак Норрис смог досчитать до бесконечности дважды?
Ответы на эти вопросы могли бы значительно продвинуть познание в
сложившуюся щель между макро и микро космосами астрофизикой и
квантовой механикой.
Думаю, за ответами на них может быть сокрыта сама тайна творения.
Но существует вероятность, что как только её кто-то осознает, этот
уровень закончится, и начнётся новый. А у меня дети, так что
займёмся пока чем-то менее опасным.
Ненаблюдаемость четвёртого измерения
В предыдущей статье я разбирался с тем, как получается
метрика FLRW. Четвёртая мера там использована в виде линейного
множителя в метрическом тензоре, в виде некоторого показателя
кривизны

:

В том представлении всё пространство Вселенной наполнено
гомогенной, равномерно распределённой энергией массы, искривляющей
пространство так же равномерно. При этом процесс носит динамический
характер масса растягивается, вследствие чего плотность энергии
деградирует. Деградирует и кривизна.
Вместе с тем, каждый массивный объект (
решение Шварцшильда) искривляет вокруг себя
пространство дополнительно.
Получается, масса, будучи энергией, создаёт кривизну. А что не
масса, то энергия в чистом виде бозоны электромагнитного и сильного
взаимодействия этой кривизне подчиняются. Из всех фундаментальных
частиц не обладают массой только фотоны и глюоны.
Я предлагаю допустить, что вся энергия и есть кривизна. Тогда
массивные частицы не искривляют пространство для всех остальных
частиц. Они и есть искривление пространства. Как и не
массивные.
Для существа, ощущающего мир плоским, все отклонения от
евклидовой геометрии пространства будут казаться
энергией.
Четвёртое измерение вполне наблюдаемо, мы просто настолько привыкли
к тому, что ручка падает со стола на пол, а горячие предметы
обжигают, что не видим общего все виды энергии могут быть описаны
как искривление наблюдаемого 3-пространства, которое может быть
формализовано через дополнение ещё одним (как минимум)
измерением.
Мы наблюдаем этот мир через фотон. И если гнётся фотон
гнётся мир.
С другой стороны, как было уже написано выше, вид энергии
электромагнитное излучение может представлять собой такой вид
движения, который определённым образом сориентирован в пространстве
относительно осциллятора, и сообразно этому своему внутреннему
свойству формирует трёхмерную гиперповерхность, над и под которой
могут присутствовать движения других относительных конфигураций
(например, бозон Хиггса со спином 0 может быть примером полностью
перпендикулярного 3-пространству движения), которые исчерпывающе
объясняли бы все эффекты полей.
Вот тут с галёрки подсказывают: Ана и Ката. Спасибо, мистер
Хинтон!
Принцип образования массы
Не так давно, в 2015-ом году Нобелевскую премию по физике получило
исследование Артура Мак-Дональда и Такааки
Каджиты, подтвердившее наличие
нейтринных осцилляций.
Вот
здесь подробно-доступно.
Осцилляция массы это, как мне кажется, ключ. Масса не является
каким-то внутренним неотъемлемым свойством частицы, масса это
характеристика ориентации n-мерного движения по отношению к
наблюдаемому 3-пространству. У нейтрино ориентация шатается, у
остальных относительно стабильна.
К слову, ничем, кроме массы, поколения нейтрино не отличаются.
Получается, что если представить все фундаментальные частицы
различными формами искривления колебательного движения в 4+
пространстве, то у частиц имеющих прямой угол между вектором
колебательного движения и осями

3-пространства масса наблюдаться
не будет. И наоборот.
Ещё Ньютон считал, что свет может при определённых обстоятельствах
порождать материю.
То есть в моём представлении кварк, например, может является
повёрнутой электромагнитной волной, и если собрать группу из трёх
таких развёрнутых ЭМВ, и сориентировать их колебания
перпендикулярно друг другу, то итоговое колебание группы приобретёт
новые свойства, а мы получим эскиз модели протона/нейтрона энергии,
стабилизированной в 3-пространстве, а заодно объяснение
превращениям фотонов в кварки и процессам "
выхватывания виртуальных кварков из
пространства", когда двоим нужен третий: энергия двух
перпендикулярных колебаний либо создаёт дополнительное возмущение
осциллятора в виде третьего перпендикулярно колебания для
стабилизации группы в качестве протона-нейтрона, либо переходит в
другое стабильное состояние электромагнитное излучение, и
рассеивается.
Кривизна фундаментальных частиц
Предполагая энергию потенциально совершённой работой, а работу, в
самом простом представлении, движением, мы можем представить массу
законсервированной энергией. То есть стабилизированным в
3-пространстве движением, противопоставляя его нестабильному
(вынужденному двигаться со скоростью света) состоянию ЭМВ, тогда
кривизна 3-пространства, создаваемая массой будет
законсервированным движением, проявляющимся лишь частично в
наложенном на него фотонном слое.
То есть массивные объекты являются движением эквивалентным энергии

, и невидимым в 3-пространстве,
потому что последнее создано фотонным слоем. Но фактически
существующим в 4+.
Масса это форма существования энергии. Энергия это форма кривизны.
Кривизна это результат пространственного отношения движений.
Тогда
Каждая фундаментальная частица может быть представлена
уравнением движения в n-мерном пространстве, обуславливающим её
наблюдаемые в 3-пространстве характеристики.
Самым очевидным на мой взгляд направлением для распутывания того
предполагаемого многомерного клубка, которым в новом свете
представляются эмпирические данные квантовой механики о
взаимодействиях и характеристиках фундаментальных частиц, является
анализ данных об электромагнитных волнах в вакууме. Фотоны в
пустоте почти лишены внешних воздействий, и все их ключевые черты
должны хорошо просматриваться. Плюс к тому, есть огромный пласт
исходных данных в виде показателей космологического красного
смещения, светимости по частотам и прочее для различных космических
объектов, очищенных от влияния локальных искажающих факторов.
Кривизна фотона
Наблюдаемое отклонение кривизны траектории фотона в гравитационном
поле компактного массивного объекта не зависит от его, фотона,
энергии. Возможно, соотношение кривизны ЭМВ к кривизне
гравитационного поля массивного тела на небольшом расстоянии (для
появления эффекта гравитационного линзирования) недостаточно велико
для обнаружения отклонений, обусловленных количеством энергии
ЭМВ?
В таком случае на длительном промежутке времени всё равно возникали
бы условия для различимой дисперсии, чего, однако, не
происходит.
Тогда собственное движение фотона должно иметь конфигурацию не
влияющую на поперечное искривление траектории в видимом
пространстве, но, возможно, оказывающим влияние на кривизну
траектории продольно.
Очевидно, что поперечное колебание ЭМВ можно считать
сбалансированным:
Предположим, что в плоскости
равномерно проявляется колебание,
происходящее в других измерениях, и расположенное перпендикулярно к
обеим этим осям. Это одновременно гарантирует сбалансированность и
отсутствие влияния на поперечное искривление.
Я подразумеваю эффект схожий с появлением вертикальной составляющей
у волн на поверхности воды, если под водой начать двигать рукой в
горизонтальном направлении.
Тогда движение по оси

является проявлением той части
колебания, которая, во-первых, не сбалансирована, а во-вторых, не
перпендикулярна исходному колебанию.
Можно попробовать формализовать модель фотона, исходя из этих
предположений, но сперва я хочу закончить с частью качественных
описаний.
Космологическое красное смещение
Результат ещё одной кропотливой работы группы Сола Перлмуттера, за
которую он, Брайан Шмидт и Адам Риссбыл были удостоены Нобелевской
премии по физике за 2011 год:

Это зависимость космологического красного смещения сверхновых типа
SNIa от расстояния.
Само космологическое красное смещение было обнаружено мистером
Эдвином Хабблом ещё в тридцатых годах прошлого столетия. Примерно
тогда же была проведена параллель и установлена пропорциональная
зависимость между ККС, а следовательно, энергией фиксируемого
излучения, и космологическим масштабным фактором современной
стандартной космологической
модели -CDM:

где
z космологическое красное смещение,

длины волн, частоты, энергии и масштабные
факторы в момент приёма (
observer) и эмиссии
(
emitter)
Обращу внимание на четыре детали. На то, что закономерность
установлена:
- До появления данных с большими значениями ККС (
 ).
).
- До появления модели фотона.
- На основании вида геодезических, получаемых в модели FLRW:

- На основании соотношения де Бройля:

Отмечу, что до самого конца жизни в 1953 г. Хаббл пытался найти
объяснение ККС в обход модели расширяющейся Вселенной,
преимущественно рассматривая кривизну отличной от евклидовой
геометрии пространства, а де Бройль в качестве способа разрешения
корпускулярно-волнового дуализма выдвинул весьма смелую гипотезу о
волновых свойствах всей материи. Из статьи по ссылке выше:
Если же считать электрон волной, то, чтобы он вписался в орбиту
заданного радиуса, надо, чтобы длина окружности этой орбиты была
равна целому числу длины его волны. Иными словами, окружность
орбиты электрона может равняться только одной, двум, трем (и так
далее) длинам его волн. В случае нецелого числа длин волны электрон
просто не попадет на нужную орбиту.
Моя гипотеза, по сути, является продолжением гипотезы де Бройля. И
если в истинности его соотношения (п.4) я не сомневаюсь она
вплетена в современную физику и интуитивно понятна, то
космологическая часть, следующая из решения Фридмана (весьма
обобщённого вида), требует внимательнейшего изучения.
Безотносительно истинности всего выше и ниже написанного я глубоко
убеждён, что ККС является самым слабым и недоработанным местом
современной космологии, вопреки тому, что является её ключевым
параметром.
Если записать интервал следующим образом:

где

фактор,
обусловленный гравитацией материи;

фактор,
обусловленный энергией фотона;
то полученный в результате показатель ККС будет:

И характер погрешности даваемой от принятого в стандартной
модели:

определяется моделью взаимодействия ЭМВ с гравитационным полем.
Прежде, чем пускаться во все тяжкие с построением красивых
математических конструкций, я подумал, как бы могла проявить себя
такая зависимость в имеющихся данных.
And I got in!
Продольная кривизна и сверхновые
Если собственная кривизна-энергия фотона, взаимодействуя с
кривизной пылевидной материи или идеальной жидкости, влияет на
итоговую общую кривизну в направлении оси распространения
(продольно) (собственная кривизна ЭМВ с одной стороны связана с её
частотой, а с другой влияет на взаимодействие с общей кривизной
Вселенной в области распространения колебания), то это происходило
бы следующим образом:
чем выше частота фотона при эмиссии

тем меньше радиус
собственной кривизны

тем меньше влияние
кривизны Вселенной (который масштаб) относительно фотонов меньшей
частоты
тем короче путь волны в
совокупно искривлённом пространстве.
Значимость такого эффекта даже при его наличии будет ничтожна, но
его можно попробовать проверить.
Самые дальние объекты с событием сверхновые типа SNIa это взрыв
звезды. Их снимают с использованием стандартных фильтров (
фотометрические системы). Последние исследования
типа
Sloan Digital Sky Survey ведутся с
использованием системы
ugriz:

В процессе взрыва сверхновой типа Ia подавляющая часть энергии
уходит на выталкивание материи самой звезды в пространство, и носит
кинематический характер. Электромагнитная составляющая носит скорее
характер побочного эффекта, забирая менее 1% от общей энергии
взрыва.
ЭМВ появляется в результате бета распада
изотопа никеля 
до кобальта

с выделением гамма-кванта.
Так выглядят графики светимости относительно недавних
сверхновых.
График светимости
SN2016dxv,

:

График светимости
SN2005hy,

:

График светимости
SN2005fm,

:

График светимости
SN2006fz,

:

А так выглядит график светимости наиболее хорошо отснятой
SN2013hy из сверхновых с большим показателем
космологического красного смещения (

):

Аналогичных по древности происхождения, количеству снимков и
использованных фильтров пока нет.
На всех графиках хорошо просматривается смещение между пиками
светимости на разных фильтрах, особенно

SN2006fz хорошо видно, что на пятидневном промежутке в
центре происходит их пересечение:

следовательно, экстремум графика

неминуемо раньше экстремума графика

.
Вместе с тем, на графиках сверхновых с ККС такого же порядка как
SN2016dxv (
) расслоения почти не
наблюдается, а у SN2013hy оно выглядит наиболее выраженным и
максимальным по времени.
Аппроксимация смещения между всеми пиками g, r, u и z примерно
одинакова, и равна 4 дням. Ориентировочный возраст сверхновой с
таким ККС по современной шкале для плоской Вселенной с плотностью
равной критической и без мрачной лямбды составит 7,4 млрд. лет.
4 дня, конечно, выглядят незначительной погрешностью в таком
масштабе (если быть точным величина ККС, рассчитанная для
аналогичных условий, составит примерно 5,4e-13), но вполне
системной погрешностью именно так могли бы соотноситься кривизна
одного фотона и гравитационного поля Вселенной в некоторой
точке.
На больших же значениях ККС слишком мало данных, чтобы однозначно
интерпретировать результат.
Здесь
каталог, кому интересно: внизу можно выставлять границы требуемых
параметров поиска.
Обращу внимание, что в графиках показаны экстремумы по принятому
показателю длины волны. Поэтому сравнение напрямую не совсем
корректно, но позволяет оценить величину расслоения излучения по
времени в зависимости от показателя ККС, которого при одинаковой
скорости не должно было возникнуть ни по причине изменения числа
принимаемых за секунду фотонов от удаляющегося источника, ни по
причине изменения энергии фотонов.
Продольная кривизна и реликт
В применении к космическому сверхвысокочастотному фоновому
излучению этот аспект выглядит ещё интереснее, но без картинок и
видимой возможности сколько-нибудь точно подтвердить или
опровергнуть. Однако, всё же!
По аналогии с предыдущим объяснением такие древние ЭМВ как
реликтовое излучение, будучи эмитированы гораздо раньше любой из
наблюдавшихся сверхновых (

), должны были бы иметь
значительное временное расслоение фотонов разной энергии, и в связи
с относительной единовременностью события рекомбинации водорода,
такие ЭМВ должны были бы формировать фронты, зависящие как от
величины энергии эмиссии фотонов, так и от времени эмиссии. В
итоге, такое излучение представляло бы собой достаточно изотропный,
смазанной фон, за которым легко могли бы укрыться самые
величественные стены (
Слоуна).
Минус одна макропредпосылка.
Кривизна пустого пространства
Взглянем на кривизну пространства без внешних факторов: то есть
решим уравнения ОТО для пустого (вакуумный случай) плоского
(метрика Минковского) локального (без лямбды) пространства, но! с
масштабом
, выполняющим в данном случае функцию
кривизны.
Формально исходные данные будут выглядеть так:
![$\begin {cases} R_{\mu \nu} - \frac{1}{2} \cdot R = \frac{8 \pi G}{c^4} \cdot T_{\mu \nu} = 0 ; \\ ds^2 = -c^2 \cdot dt^2 + R^2 \left[ dx^2+dy^2+dz^2 \right]. \\ \end {cases}$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/920/f72/df5/920f72df5f25104216369249dfc40d0a.svg)
В таком упрощённом случае решением будут два уравнения
(темпоральная и пространственная часть, соответственно):

Кому интересно, как считать
здесь целая статья.
И если первая (красная) часть решения говорит нам о том, что в
отсутствие взаимодействующего объекта энергия (связанная с
кривизной:

) и время (

) не изменяются, то вторая
(зелёная, она повторяет решение Фридмана без лямбды для плоского
пространства:
формула 4) часть, может быть представлена в
виде:

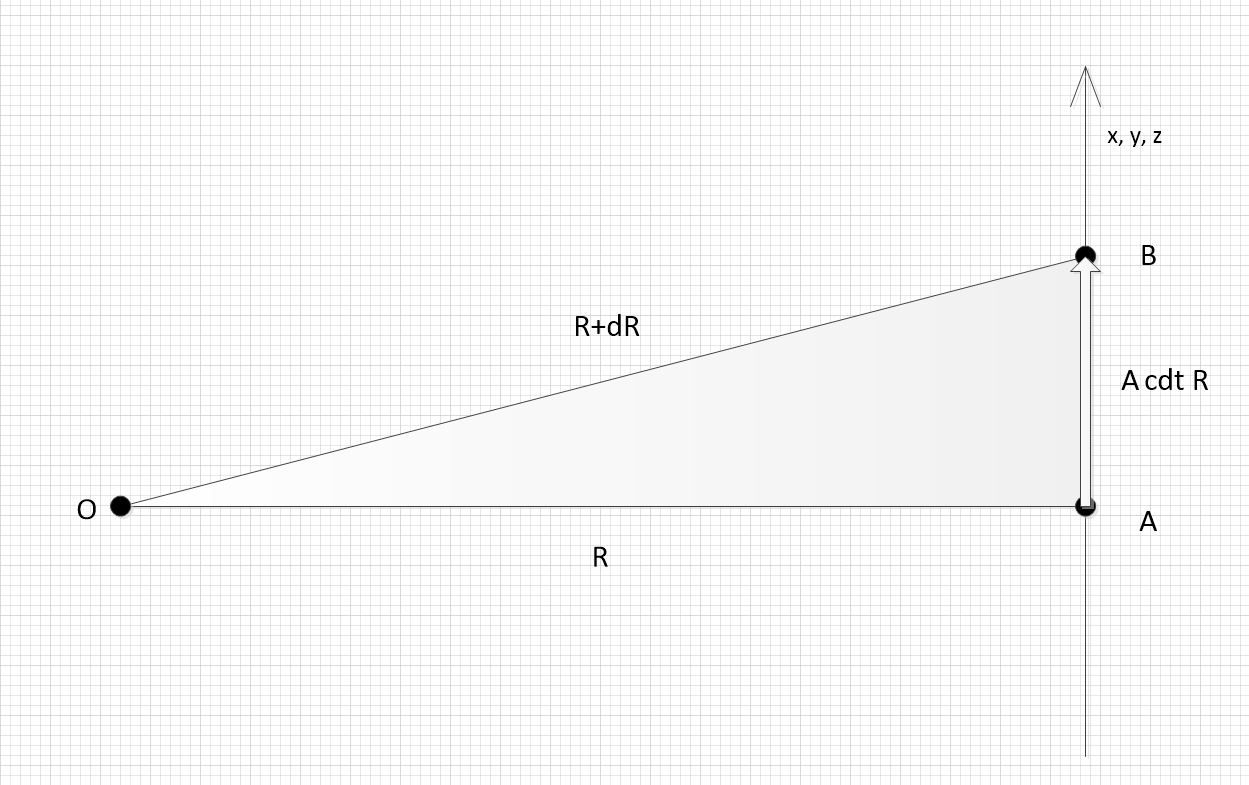
Скажем, (1) это пустая геометрия гравитационного взаимодействия с
линейным пространственным множителем.
Видно, что правая апельсинка является катетом в прямоугольном
треугольнике, из которого следует, что
величина всегда мгновенно
перпендикулярная наблюдаемому 3-пространству.

Кроме того, я тащил ноль, чтобы показать, что если вместо него
будет стоять величина, определяемая тензором энергии-импульса (при

), то треугольник
перестанет быть вырожденным,

, что в контексте всего выше
написанного можно охарактеризовать так:
Взаимодействием двух носителей
энергии-кривизны-движения является обмен
энергией-кривизной-движением.
Но для пустого пространства всё же

. Что
формально означает, что осциллятор может принимать любые значения
кривизны, однако, снова же, в контексте статьи:
Кривизна пустого пространства не
определена.
Я бы сказал, что пространство в его геометрическом смысле не
является объектом физики. Парадигма искривления
пространства-времени была заложена в ОТО для объяснения воздействия
гравитации на фотон, которого в классическом, ньютоновском
представлении о гравитации не должно было бы происходить.
Однако уже самой теорией относительности определение гравитации
было расширено, фактически, до механизма взаимодействия энергии с
энергией через модификацию пространства.
Осталось убрать пустую прокладку и, определив гравитацию просто как
механизм взаимодействия энергии и энергии, найти её форму.
Для этого необходимо представить пространство пустым вместилищем
сущностей фундаментальных частиц и их производных, а свойство
кривизны перенести на локальный объект как меру и способ его
взаимодействия.
Проще говоря, я предполагаю, что вследствие гравитации гнётся не
пространство-время, но все возможные виды фундаментальных частиц
участвуют в этом базовом взаимодействии, при этом скорость течения
их собственного времени и траектории изменяются. Фотон при этом
гнётся хуже, чем, например, сопоставимая по энергии массивная
частица, но так же, как и она, вследствие наличия механизма
взаимодействия между его собственной кривизной и кривизной
гравитирующего тела, является активным участником процесса, а не
пассивным пассажиром геодезических линий.
Форма кривизны
1. Ещё раз взглянем на пространственную часть решения, но
уже в пространстве с некоторой энергией, не важно пока какой:

Вид уравнения в левой части это половина дифференциального
уравнения окружности типа

. Приведу
к одному виду, чтобы было понятно:

То есть пространственная составляющая механизма гравитации является
половиной вращательного движения. Небезосновательной была бы
попытка предположить, что второй, недостающей до закона сохранения,
частью является уравнение изменения кривизны второго участника
обмена энергией, и посмотреть, что из этого получится:

Слева зелёным подразумевается, например, кривизна гравитирующего
объекта, справа синим изменение кривизны фотона. При отсутствии
взаимодействующего объекта синяя и зелёная части становятся
вращениями неизменного радиуса, сохраняя энергию. В идеально пустом
пространстве.
Для всех случаев (2) можно переписать так:

Или, подставив (1):

В результате чего, соотношение между радиусом кривизны фотона

и внешней кривизной

на локальном промежутке будут
всегда линейны, но длинной дистанции проявляли бы свойства
тригонометрической зависимости.
Посмотрим, как это может происходить.
2. Если посмотреть на рисунок выше, видно, что:
![$] \angle AOB = \angle \alpha: \cos^2\alpha = \frac{R^2}{(R+dR)^2}$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/f56/8e8/908/f568e8908d46790ef13c941c6d71b489.svg)
Тогда для общего случая пространственная часть решения будет:

А (2) и (3) можно представить так:

где

угол совокупной кривизны Вселенной
в точке,

угол кривизны фотона, который,
как и радиус, кривизны связан с частотой, но, в отличии от него,
гипотетически должен быть ей линеен:

.
Оставим пока только материальную (зелёную часть):

Время течёт линейно в области пространства, где корень из плотности
потока импульса изменяется по тангенциальному закону. Если развитие
ККС, принятое сейчас линейным скорости течения времени (

),
поставить в зависимость от угла кривизны (
) фотона, то оно приобрело бы
лёгкий тригонометрический флёр:
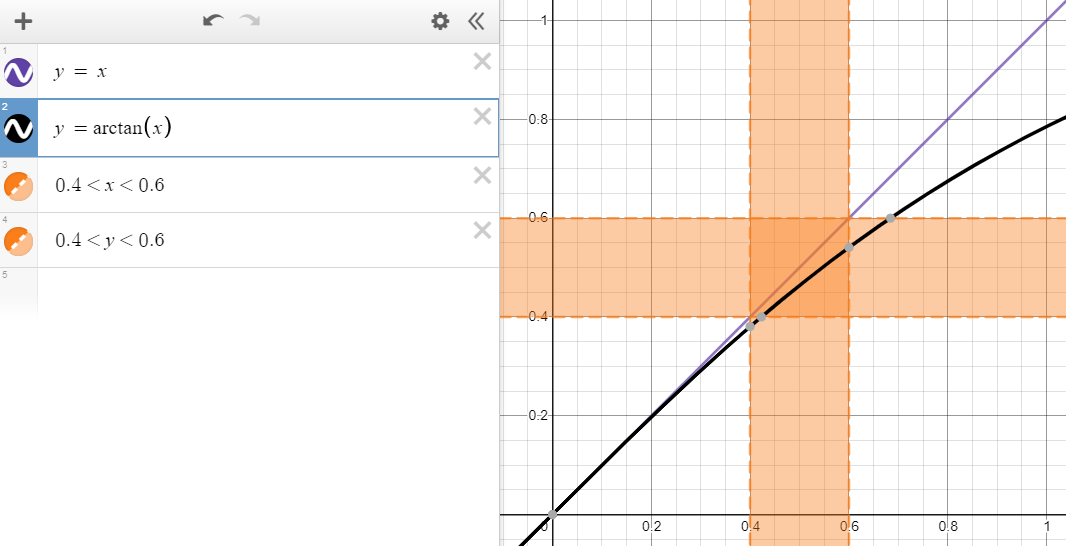
На вид примерно такого же искривления не хватает графику
сверхновых, для объяснения ускоренного расширения:

Это, что называется, очень на пальцах. Надо проработать.
3. Ну, и просто, чтобы пунктов в этой части было уже три,
формула объёма гиперповерхности 3-сферы:

Как говорится, живите теперь с этим.
Резюме
Прямая как частный случай вращения, а не наоборот, кажется более
предпочтительным способом систематизации, потому что всё вокруг нас
сферы и вращение. Как-то глупо считать одну из характеристик фотона
единственным исключением в этом тотальном правиле.
А что касается количества измерений, их может быть множество.
Важно, что вне зависимости от их количества, с ними можно начать
работать как с единым радиусом кривизны в квадрате.
Интересно, что сам Фридман использовал для решения интервал в
несколько иной форме, чем я использовал в предыдущей статье для
расчётов. Он использовал полярные координаты 3-сферы, сделав её
радиус варьируемым по времени.
В первом приближении предложенная гипотеза в приложении к имеющимся
астрономическим данным даст именно 3-сферическую форму
Вселенной.
Спасибо всем, кто вывез. Идеи, как вирусы. Одними нужно переболеть,
другие способны убить, а третьи просто перепрошивают исходники
навсегда.

 , и зададим
в нём сферические координаты
, и зададим
в нём сферические координаты  :
:![$] \, {w = r\sin\theta\sin\phi\cos\eta; \\ x = r\sin\theta\sin\phi\sin\eta; \\ y = r\sin\theta\cos\phi; \\ z = r\cos\theta } \\$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/318/4fe/740/3184fe7403dd20a21c40a62aa566e749.svg)


 интервал:
интервал:
 в силу
рассмотрения энергетически замкнутой системы, что будет
предполагаться истинным и для Вселенной в целом (решение Фридмана),
и для сферически симметричного массивного тела (решение
Шварцшильда). Читатель не согласный с такой трактовкой, может
просто считать это математическим трюком:
в силу
рассмотрения энергетически замкнутой системы, что будет
предполагаться истинным и для Вселенной в целом (решение Фридмана),
и для сферически симметричного массивного тела (решение
Шварцшильда). Читатель не согласный с такой трактовкой, может
просто считать это математическим трюком:

 является псевдоевклидовым:
является псевдоевклидовым:
 по углу
по углу  равны:
равны:

 с линейными по
с линейными по
 базисными векторами:
базисными векторами:
 , и с мгновенной длиной
, и с мгновенной длиной  , в нашем
случае совокупно редуцированной на величину
, в нашем
случае совокупно редуцированной на величину  :
:
 . Упаковать лишний
. Упаковать лишний  будет практичнее снова в
сферических, только уже обычных для трёхмерной сферы
будет практичнее снова в
сферических, только уже обычных для трёхмерной сферы  . Чтобы различать координаты для 3-сферической и
2-сферической систем, последние обозначим
. Чтобы различать координаты для 3-сферической и
2-сферической систем, последние обозначим  :
:
 ,
а
,
а  по теореме тангенсов:
по теореме тангенсов:

 получаются соответствующие
решения.
получаются соответствующие
решения. :
:

 .
. показывают консолидированное
отклонение от этой зависимости.
показывают консолидированное
отклонение от этой зависимости.
 , то
, то 
 для пустого 3-пространства в
сферических координатах
для пустого 3-пространства в
сферических координатах 
 по порядку: время, кривизна
(энергия), радиус (расстояние) в сферически симметричном
гравитационном поле по нулевой общей кривизне пространства.
по порядку: время, кривизна
(энергия), радиус (расстояние) в сферически симметричном
гравитационном поле по нулевой общей кривизне пространства.

 , равномерно искривлённым:
, равномерно искривлённым:
 в пространстве
в пространстве 
 координаты в декартовой системе
координат, смещённой относительно
координаты в декартовой системе
координат, смещённой относительно 
 :
:  . Или:
. Или:
 замечательно
резонирует с отношением из доказательства Харди
замечательно
резонирует с отношением из доказательства Харди  (a катет, c
гипотенуза).
(a катет, c
гипотенуза). отсюда в (1), и выражаем
отсюда в (1), и выражаем 


 )
)  . Как если бы перед
. Как если бы перед
 был ноль.
был ноль. .
. ). Можно представить все три случая
так:
). Можно представить все три случая
так:
 (1)
(1) дифференцируем и
выражаем dw:
дифференцируем и
выражаем dw:![$dw^2=\left[ \frac{xdx+ydy+zdz}{w} \right]^2$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/c97/2f7/4aa/c972f74aa324b77638d37a3e1778975a.svg)

![$dw^2= \frac{\left[xdx+ydy+zdz \right]^2}{R^2 - x^2+y^2+z^2}$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/d7d/66f/06d/d7d66f06dfc19ff958574ac705913cbb.svg) подставляем в (1):
подставляем в (1):
 :
:


![$= \left[ \color{red}{\frac{r^2}{R^2-r^2}}+1 \right] dr^2 +r^2d\theta^2+r^2\sin^2\theta d\phi^2 =$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/8d9/c84/bb1/8d9c84bb19a1a5cfddc600f1fb2e17e8.svg)
![$= \left[ \frac{R^2}{R^2-\color{red}{r^2}} \right] dr^2 +r^2d\theta^2+r^2\sin^2\theta d\phi^2 =$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/9fa/ad8/d12/9faad8d1232ece9782161fb127de32bc.svg)

 линейная координата (первая),
линейная координата (первая), угловые координаты
(вторая и третья),
угловые координаты
(вторая и третья), ;
;


 ;
;  .
.![$dl^2=R^2 \left[ \color{red}{\frac{1}{1-kx^2}}dx^2+\color{green}{x^2}d\theta^2+\color{blue}{x^2\sin^2\theta} d\phi^2 \right]$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/375/9ce/df5/3759cedf58030358843034e0b693a735.svg)
 . Это важно. Я вернусь к этому в одной
из следующих статей.
. Это важно. Я вернусь к этому в одной
из следующих статей.


![$ds^2=-dt^2+dl^2=\color{magenta}{-1}\cdot dt^2+R^2 \left[ \color{red}{\frac{1}{1-kx^2}}dx^2+\color{green}{x^2}d\theta^2+\color{blue}{x^2\sin^2\theta} d\phi^2 \right]$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/9a7/e79/85e/9a7e7985e6ca9df09111504adedf1b07.svg)
 по оси
по оси  точка A перемещается в пространстве
точка A перемещается в пространстве
 . Размерность оси времени равна
. Размерность оси времени равна
 (скорость света), при которой
(скорость света), при которой
 (светоподобный интервал равен
нулю).
(светоподобный интервал равен
нулю). :
:
 .
. , это
простое тождество впрямую работать уже не будет.
, это
простое тождество впрямую работать уже не будет. :
:


![$\color{green}{\frac{\partial^2 x'^l}{\partial t^2}} + \color{magenta}{\left[ \left( \left\{ \frac{\partial x}{\partial x'}\right\}^{-1}\right)_i^l \frac{\partial^2 x^i}{\partial x'^j \partial x'^k} \right]}\frac{\partial x'^j}{\partial t}\frac{\partial x'^k}{\partial t} = 0$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/eee/850/99d/eee85099d19d521dfbba2cf41dcf61ee.svg)
 , и есть символ Кристоффеля
второго рода (6):
, и есть символ Кристоффеля
второго рода (6): это множитель при базисном векторе
$inline$\vec{e_\color{red}{x'^l}}$inline$, соответствующий его
искривлению при перемещении базисного вектора
$inline$\vec{e_\color{green}{x'^j}}$inline$ по оси
это множитель при базисном векторе
$inline$\vec{e_\color{red}{x'^l}}$inline$, соответствующий его
искривлению при перемещении базисного вектора
$inline$\vec{e_\color{green}{x'^j}}$inline$ по оси  :
: координата базисного
вектора, при котором стоит коэффициент;
координата базисного
вектора, при котором стоит коэффициент; координата изменяемого
базисного вектора;
координата изменяемого
базисного вектора; координата по которой
отслеживается изменение.
координата по которой
отслеживается изменение.
 :
:

 :
:


 верно:
верно:









 ? Это представление тензора
? Это представление тензора
 в ковариантных координатах. Сам
тензор пространства-времени
в ковариантных координатах. Сам
тензор пространства-времени 
 ? Это просто сокращение от:
? Это просто сокращение от: ), мы можем ещё
немного упростить полученную формулу:
), мы можем ещё
немного упростить полученную формулу:
































 , а
так как наш тензор пространства-времени диагональный, то ненулевыми
будут только компоненты вида
, а
так как наш тензор пространства-времени диагональный, то ненулевыми
будут только компоненты вида  :
: ).
).























 тензор Риччи,
тензор Риччи,  тензор пространства времени,
тензор пространства времени,
 мрачная лямбда,
мрачная лямбда,
 вселенские константы,
вселенские константы,
 тензор энергии-импульса.
тензор энергии-импульса. плотность массы пыли.
плотность массы пыли. :
:

 :
:

 -CDM
-CDM
































