"РобоКросс". А если полностью - Ежегодные полевые испытания
беспилотных робототехнических систем РобоКросс. На Хабре были уже
статьи посвящённые РобоКроссу с описанием мероприятия с точки
зрения команд, сторонних наблюдателей и прессы. Ниже общая информация с
описанием и цифрами по командам, этого довольно необычного на
момент старта, мероприятия или точнее испытаний.

Внимание! Это не разбор решений и технических
описаний отдельных беспилотников, это попытка собрать в одном месте
всю накопленную информацию о мероприятии в целом и сохранить данные
для истории робототехники, с надеждой, что возможно это кому-то и
когда-то пригодится. Далее много текста, фото и справочной
информации.
РобоКросс был придуман и задуман вдохновителями программы Робототехника и
стартовал в 2010 году на просторах молодёжного форума Селигер. По
факту, все команды, с самого начала, были студенческие. На тот
момент даже на старте соревнования РобоКросс выглядели следующим
образом - команда берёт настоящую, действующую машину, монтирует на
неё свои (ну или чужие) системы и получается БПТС. Как с технической
точки зрения, управление КПП, двигателем, педалями, так и с
программной. Вся эта получившаяся система отправляется на полигон,
зачастую на месте доделывается и пытается выполнить задания и
действия, которые среднестатистический водитель выполняет не
задумываясь.
Справка. Согласно брендбуку
правильно писать так - РобоКросс. Р и К большие, остальное
маленькими.
Одним из самых интересных фактов РобоКросс-2010 было то, что он
проходил на 6 (шести) ГАЗелях Бизнес, которые Группа ГАЗ подарила
ВУЗовским командам с обязательством участия в РобоКроссе. Получив
машины всего лишь за пару месяцев до старта, команды смогли
всё-таки сделать так, чтобы машины поехали. Следующий 2011 год тоже
проходил на Селигере и уже не только с ГАЗелями. Причём надо
понимать что всё было внове, всё-таки 2010 год и технологий по
беспилотникам в широком доступе не было.

РобоКросс на Селигере
Но в тот же год стало ясно, места мало и формат не
Селигеровский. Как ни крути РобоКросс требовал больше времени,
места и оборудования для команд и в определённый момент стало
очевидно что такие испытания требуют обеспечения безопасности на
гораздо более серьёзном уровне. Всё таки, когда работает и едет
беспилотное транспортное средство, БПТС, это всегда непредсказуемо,
а значит опасно. Потеря сигнала позиционирования, сбой программы.
Всё что угодно может сделать беспилотник неконтролируемым. И пока
при первичных испытаниях никто ничего лучше не придумали, чем
территория с ограниченным доступом и барьером безопасности.
И в 2012 году (мой первый год) опробовали площадку под городом
Волоколамском. Это была асфальтированная площадка 180 * 120 м,
с рабочей частью отведённой под полигон, чуть больше чем 100 * 100
метров, огороженная забором. Территория подготовленная под какой-то
рынок, но таки не занятая им. По факту на тот момент, единственное
место, которое подошло под испытания и с которым срослось.

Волоколамск 2012 год. Стартовая арка с ГАЗелькой.
И это был первый опыт организаторов самостоятельного плавания,
так сказать без базовой площадки, где вылезло много вопросов с
организацией. Всё это было щедро приправлено неудачной погодой в
виде дождя и сильного ветра. Впрочем это и позволило закрыть все
дыры и в следующие годы провести испытания относительно
спокойно.

Группа ГАЗ - главный спонсор РобоКросса
Немного статистики и дат испытаний РобоКросс с 2010 по
2018 год
|
Год
|
Кол-во команд с беспилотными
машинами
|
Количество команд с
коптерами
|
РобоКросс Технологии
|
Unior Race
|
|
1
|
2010
|
6
|
нет
|
нет
|
нет
|
|
2
|
2011
|
7
|
нет
|
нет
|
нет
|
|
3
|
2012
|
6
|
нет
|
нет
|
нет
|
|
4
|
2013
|
9
|
нет
|
нет
|
нет
|
|
5
|
2014
|
7
|
3
|
нет
|
нет
|
|
6
|
2015
|
9
|
9
|
нет
|
нет
|
|
7
|
2016
|
6
|
4
|
2
|
нет
|
|
8
|
2017
|
8
|
6
|
2
|
3
|
|
9
|
2018
|
10
|
4
|
нет
|
7
|
В разное время в зависимости от наличия возможностей в качестве
приза за победу командам доставалась оплата поездки на
международные соревнования - испытания ELROB(https://www.elrob.org/) или
небольшие призы.
Смогли посмотреть на других, себя показать и поучаствовать в
международных соревнованиях:
-
2013 - команда RedEyes из Коврова. Швейцария.
-
2014 - команда НАМТ из Нижнего Новгорода. Германия
-
2015 - команда Аврор из Рязани. Польша
-
2016 - команда Аврора из Рязани. Австрия.
Вот команды которые приезжали на РобоКросс с 2010 по 2018 год,
некоторые соответственно по нескольку раз (просто в алфавитном
порядке):
-
4х4 / г. Нижний Новгород, НГТУ им Алексеева
-
Avrora Robotics / Рязань, ООО "КБ Аврора"
-
BaumanCar / г. Москва, ФГБОУ ВПО Московский государственный
технический университет имени Н.Э. Баумана
-
CVL Robots / г. Москва, Московский государственный
машиностроительный университет (МАМИ)
-
KSTA Team / Владимирская область, ФГБОУ ВПО КГТА им. В.А.
Дегтярева
-
Le Talo / г. Владимир Le Talo Robotics
-
LOOK / г. Рязань Рязанский государственный радиотехнический
университет, Студенческое конструкторское бюро (СКБ)
-
MobRob / г. Саратов, Саратовский государственный технический
университет имени Гагарина Ю.А.
-
Red Eyes / г. Ковров, ФГБОУ ВПО КГТА им. В.А. Дегтярева
-
АВРОРА / г. Рязань
-
ВОЛГА / г. Нижний Новгород, Нижегородский государственный
университет им. Н.И. Лобачевского
-
ЛК / г. Рязань, ФГБОУ ВПО ""Рязанский государственный
радиотехнический университет" (ФГБОУ ВПО ""РГРТУ"")
-
ЛТИС / г. Москва, МАИ
-
МК Ультра-НН / Нижний Новгород, ГБОУ СПО НАМТ и ФГБОУ ВПО НГТУ
им. Р.Е. Алексеева
-
НАМТ / г.Нижний Новгород, ГБОУ СПО НАМТ
-
Роботон / г. Рязань, ФГБОУ ВПО "РГРТУ"
-
СКБ ФАУСТ МАИ / Москва Московский Авиационный институт.
-
Технотон/ г. Рязань, ФГБОУ ВПО "РГРТУ"
-
УМиКо / г. Москва, Университет Машиностроения (МАМИ)
-
ФАУСТ / г. Москва, МАИ
-
ФГУП "НАМИ" / г. Москва, ГНЦ РФ ФГУП "НАМИ"
-
Фидесис / Москва Фидесис
-
Физтех / Москва, МФТИ
-
Шрёдингер кота / г. Уфа, Уфимский государственный колледж
радиоэлектроники
Любопытные организационные тонкости.
Говоря про задания, точно можно утверждать, что с течением
времени задания испытаний менялись совсем не кардинально и очень
плавно. Связано это было с тем, что основные участники РобоКросса
всё-таки студенческие команды. В течение учебного года у них куча
других вопросов - учёба, активности ВУЗа, в конце концов работа
которая параллельно с учёбой. И погружаться в смысл заданий они
начинали в лучшем случае за пару месяцев до самих испытаний, а то и
уже на самом мероприятии. Это конечно сильно сказывалось на
результате. И именно в таком формате РобоКросс стал прекрасной
площадкой для ребят и себя показать и на людей посмотреть.

Схема стандартного расположения служб на
малом испытательном кольце автополигона "Берёзовая пойма"
О самих заданиях можно сказать что основное базовое задание
всегда было движение из точки А в точку В в автоматическом, то есть
автономном режиме. Дальше уже в зависимости от года и ситуации
добавлялись всякие расширения: препятствия, фиксация камерой и
передача изображений, разворот с помощью заднего хода, возврат в
точку старта, следование за меткой.
Первоначально задания были совместным творчеством собственно
организаторов. А вот 2013 года в формировании регламента и
требованиям которые выдвигались к беспилотникам стал принимать
участие Объединённый инженерный центр автозавода ГАЗ. Регламенты
стали выглядеть грамотно технически и более если так можно сказать,
обоснованно. Конечно регламенты и задания не раз вызывали споры на
испытаниях и апелляции команд, но я и сейчас продолжаю считать что
подключение таких специалистов было очень правильным и
своевременным шагом. Главный судья РобоКросса с 2013 года ведущий
специалист Объединенного инженерного центра.
Вот пример регламента испытаний
2017 года.
Разделение между организаторами и специалистами ГАЗа функций по
техническому обеспечению и смысловому наполнению позволило
сосредоточиться каждому на своём деле. Ведь таких мероприятий и
испытаний в нашей стране до 2010 года не было. Понятно что можно
сравнить с гонками и ралли разных классов и видов, но лишь только
сравнить. На деле на площадке появлялась куча нюансов, которые
приходилось решать уже на месте.

Машинка команды "Аврора" под граундом
Так же на Хабре неоднократно появлялись статьи про организацию
технических мероприятий, где подробно расписывались все аспекты. В
организации соревнований БПТС, тем более полевых, есть куча
мелочей, которые надо продумать и учесть. Но что точно на таких
испытаниях приходилось делать, так это приспосабливать все знания и
очевидные вещи, которые есть при подготовке всех мероприятий, но
выглядят совсем по другому на испытаниях беспилотников, в том числе
потому, что они происходят в поле.

Типичный вид трассы РобоКросса. Бочки -
это препятствия. Мешки с песком для устойчивости знаков.
В первую очередь, это где и как разместить команды. Как ни
странно самый удачный вариант оказался в палатках рядом с
полигоном, тем более если территория позволяет. Тот же Волоколамск
показал. что возить людей на автобусах утром и вечером в гостиницу
неудобно ни для команд, ни для организаторов. Участники, как
настоящие фанаты своего дела, паяли и программировали почти
круглосуточно. Увезти и привезти всех в один час, нереально и я бы
сказал даже не правильно. Оказываясь на полигоне, нередко без
стабильного интернета, они наконец то могли заняться только своим
проектом и ничем другим.

Установка
антен мониторинга
Часто полевые условия напоминали о себе, солнце, жара и самое
главное дождь. Который всегда невовремя. Ни для команд, ни для
электричества. Так была выбрана оптимальная высота граунда укрытия
для команд и их машин, где под одной крышей можно разместить от 6
до 10 машин. По высоте тента ГАЗели, самой высокой машины
испытаний, чтобы она точно заходила под навес. А по периметру
граунд завешивался баннерами сеткой, это имело свой смысл - потолок
выше, дождь стекает по баннерам вниз, а ветровая нагрузка
минимальная. С точки зрения возможных осадков территория малого
кольца на автополигоне ГАЗа была идеальным местом - песчаная почва,
на которой вода уходила быстро и безболезненно даже в сильный
дождь. В то время, когда в 2017 году Нашествие под Тверью и Alfa
Future People под Нижним Новгородом тонули в грязи и трактористы за
сутки зарабатывали себе на новый трактор, на территории РобоКросса
всё было тихо и мирно, только просто очень мокро.

Большой граунд. По верху закреплены баннеры-сетки.
Ещё один вариант граунда.

Два маленьких граунда
Отдельным и ответственным блоком всегда проходило обеспечение
безопасности на площадке как днём так и ночью. Само собой полный
комплект служб - скорая, охрана и пожарные. Огнетушители и пожарные
щиты. Как бы не казалось утомительным и бюрократическим это
действо, команды всегда подписывали целый ворох бумаги. В их числе
техника безопасности, заявление об ответственности и отдельно
техника пожарной безопасности. И ещё кое чего по мелочи. Это
настраивало на серьёзный лад и организаторов и команды. Алкоголь на
территории РобоКросса всегда был под запретом, под угрозой
дисквалификации всей команды. И надо отметить что эксцессов
связанных с пьянством не было ни разу. Если команды и участники и
позволяли себе что то в ночи или в финальный день, то это не было
видно при свете дня.
В поле очень важный момент, обеспечение ветрозащиты. Всегда
старались делать с кратным запасом. Для тех кто не знает, это
якорение каждой стойки шатра или укрытия к бетонному блоку 2,4
тонны, в крайнем случае его половинке. Старожилы Селигера помнят
как летали укрытия весом в несколько сотен килограммов. Забивать
якоря в землю и песок можно только для небольших шатров.

Совсем бюджетный вариант укрытия с мощной
ветрозащитой. Этап застройки.

Вид начала старта и крепления граунда к
ветрозащитному блоку.
Бетонные же блоки в 2012 году в Волоколамске, в 2013 году
полностью и частично в 2014 в Нижнем Новгороде были основой
обеспечения периметра безопасности для заездов беспилотников. Потом
оказалось и дешевле и проще установить с разрешения полигона
основную отбортовку из стандартного однорядного дорожного
отбойника. Тем более на него прекрасно крепился специально
сделанный баннер. И красиво и безопасно.

Трасса с однорядным барьером на котором
закреплены баннеры, со знаками и БПТС команды НАМИ
В тот же 2012 год у организаторов прибавилось седых волос, когда
незабываемая команда ФАУСТ (из института МАИ) наглядно показала что
бетонные блоки надо укладывать на широкую сторону, руководствуясь
принципом то что уже повалено можно только сдвинуть, а от команд
требовать устанавливать на самих машинах кнопки безопасности
отключающие беспилотник, причём на каждом борту.
Тогда же беспилотники привязали на верёвочку, провод с кнопкой
на разрыв на конце которую должен был держать член команды. То есть
если машина уезжала от хозяина и вырывала из руки провод, то
двигатель сразу глушился. Конечно вид человека от команды, который
держал кнопку с проводом и бежал или шёл за машиной, был не очень
эффектный, но это было гораздо безопаснее. Впрочем об этом
организаторы не пожалели ни разу.
Долго ломали голову, как сделать полосу разметки на дороге.
Передумали многие варианты, в итоге её сделали из пожарного шланга
и прибили в прямом смысле этого слова.

Прибитая к грунтовой дороге разметка.
Высокие технологии
"РобоКросс" прошёл и в 2019 году. Пандемия 2019 года подкосила
всех и РобоКросса не было. Насколько известно, планируется и в 2021
году. Но про него уже расскажут ребята, которые будут его
проводить. Удачи им.
Далее официальная информация из пресс-релизов в спойлерах, чтобы
не загромождать текст.
РобоКросс-2010
РобоКросс-2010
Первые соревнования состоялись (впервые в России) 18 июля 2010
года на молодежном инновационном форуме Селигер 2010. Количество
команд от одного ВУЗа не ограничено. Согласно правилам, автомобили
должны были автономно (без участия оператора) выполнить 3
задания:
проехать по прямой от точки до точки задание являлось
квалификационным заездом;
проехать по п-образной траектории примерно 100 на 30 метров;
проехать по сложной кривой общей протяженностью около 400м.
Трасса задавалась дорожными конусами, расставленными на трассе.
Команды-участники могли заранее пройти трассу и снять координаты
узловых точек для своих автомобилей основной системой навигации
являлась ГЛОНАСС/GPS (обязательное условие соревнований) Геос-1М. Еще одним
обязательным условием было наличие системы экстренной остановки
(подобно системе E-STOP).
Команды-участники представляли такие учебные заведения как:
Московский автодорожный институт,
Ковровскую государственную технологическую академию,
Саратовский государственный технический университет,
Рязанский государственный радиотехнический университет,
Нижегородский автомеханический техникум,
Нижегородский государственный университет им. Лобачевского.
По результатам проведения Робофест-2010 командам участникам было
подарено 6 автомобилей Газель-бизнес для их переоборудования в
беспилотные транспортные средства и вручено приглашение на
Робокросс-2011. Один их спонсоров (Техновижн) так же представил для
участия свою Газель.
Места распределились следующим образом:
1. Red Eyes (Ковровская
государственная технологическая академия)
2. НАМТ (Нижегородский автомеханический техникум)
3. Аврора (Рязанский государственный радиотехнический
университет)
РобоКросс-2011
РобоКросс-2011
Соревнования снова проходили на берегу озера Селигер. Задания
включали в себя не только автономный вариант движения транспортного
средства, но и ручной:
Движение в автономном режиме по прямой и остановка
квалификация;
Движение в ручном режиме управления разведка. Необходимо было
приехать в точку с заданными географическими координатами
(координаты выдавались за полчаса перед заездом). В этой точке
находился предмет, который необходимо было опознать, и передать его
изображение;
Движение в автономном режиме по кривой (так же задаваемой
координатами узловых точек), общей протяженностью 500м
транспортировка.
На трассе находились препятствия, ширина коридора в самых узких
местах составляла около 3м (при средней погрешности ГЛОНАСС/GPS
приемника в 10м). Движение от точки до точки проходило по
произвольной траектории с учетом объезда препятствий. Оценивались
точность и время прохождения трассы. Требования к системам
навигации и экстренной остановки не изменились.
Кроме Газелей, участие принимали самодельные транспортные
средства и легковые автомобили. Квалификацию смогли пройти 7
транспортных средств.
Места распределились следующим образом, как и в прошлом
году:
1. Red Eyes (Ковровская государственная технологическая
академия)
2. НАМТ (Нижегородский автомеханический техникум)
3. Аврора (Рязанский государственный радиотехнический
университет)
РобоКросс-2012
РобоКросс-2012
18-20 июля 2012 г. в Московской области под Волоколамском прошли
третьи соревнования автомобилей-роботов РобоКросс-2012.
Зарегистрировались на месте проведения соревнований 6 команд: RED
EYES (г. Ковров), MobRob (Саратов), АВРОРА (г. Рязань), ВОЛГА (г.
Нижний Новгород), НАМТ (г. Нижний Новгород), ФАУСТ (г. Москва).
В рамках соревнований командам-участницам предлагалось создать
транспортное средство, которое в автономном или телеуправляемом
режиме будет способно пройти маршрут, посетив указанные в задании
точки. При этом транспортное средство должно провести видео- или
фоторазведку местности и передать эту информацию оператору.
Места распределились следующим образом:
1. НАМТ (Нижегородский автомеханический техникум)
2. RED EYES (Ковровская государственная технологическая
академия)
3. ВОЛГА (Нижегородский государственный университет им.
Лобачевского)
Еще один партнер Программы компания National Instruments,
учредила специальную номинацию Лучшее техническое решение. Первое
место в этой номинации заняла команда MobRob, второе ВОЛГА, третье
АВРОРА.
РобоКросс-2013
РобоКросс-2013
С 17 по 20 июля 2013 года в Нижнем Новгороде на полигоне
Автозавода ГАЗ Берёзовая пойма прошли четвёртые Ежегодные полевые
испытания РобоКросс-2013.
Задание соревнований называлось Мул и было призвано
смоделировать реальную ситуацию, в которой возникает необходимость
вернуть транспортное средство (ТС) в том числе и с грузом, в точку,
где было начато движение, в автономном режиме (без оператора или
водителя). Вес груза 5 50 кг. Начисление баллов производится за
время прохождения и факт доставки груза.
В РобоКроссе-2013 приняли участие девять студенческих команд из
Москвы, Нижнего Новгорода, Рязани, Коврова, Саратова и Уфы.
Квалификацию прошли следующие команды российских учебных
заведений:
Red Eyes (Ковровская государственная технологическая
академия),
MobRob (Саратовский государственный технический университет им.
Ю.А.Гагарина),
Аврора (Рязанский государственный радиотехнический
университет),
Волга (Нижегородский государственный университет им.
Лобачевского)
НАМТ (Нижегородский автомеханический техникум)
Места распределились следующим образом:
Аврора (Рязанский государственный радиотехнический
университет),
НАМТ (Нижегородский автомеханический техникум)
MobRob (Саратовский государственный технический университет им.
Ю.А.Гагарина).
РобоКросс-2014
РобоКросс-2014
С 07 по 12 июля 2014 года в Нижнем Новгороде на полигоне
Автозавода ГАЗ Берёзовая пойма прошли пятые Ежегодные полевые
испытания РобоКросс-2014. Абсолютным победителем испытаний стала
команда Аврора Рязанского государственного радиотехнического
университета. Команда Аврора с робототехнической системой на базе
автомобиля ГАЗель в этом году стала двукратным абсолютным
победителем РобоКросса и на церемонии награждения получила
сертификат на участие в Европейских испытаниях роботов
Eurathlon-2015. Также робототехники из Рязанского государственного
радиотехнического университета смогли стать обладателями номинаций
Лучшее техническое решение - команда Аврора, Лучшая команда в
классе Свободный - команда LOOK.
Остальные номинации испытаний распределились следующим
образом:
Командная работа - УМиКо, г. Москва (Университет
Машиностроения)
Награда от судей - BaumanCar, г. Москва (Московский
государственный технический университет имени Н.Э.Баумана);
Системный подход - Волга (НГУ им. Лобачевского г. Нижний
Новгород);
Специальный приз от Оргкомитета - ФАУСТ (Московский Авиационный
Институт).
На площадке РобоКросс-2014 также проводились испытания
беспилотных летательных систем (БЛС). Лучшая команда в испытаниях
Беспилотных летающих систем - команда ЛК из Рязани, а на втором
месте с небольшим отрывом финишировала команда из г. Коврова Red
Eyes.
РобоКросс-2015
РобоКросс-2015
Фонд Олега Дерипаска Вольное Дело и Группа ГАЗ при партнёрстве с
Фондом Сколково провели с 13 по 17 июля 2015 года в Нижнем
Новгороде соревнования автоматизированных транспортных средств
РобоКросс-2015.
Абсолютным победителем соревнований стала команда Аврора
Рязанского государственного радиотехнического университета, которая
продемонстрировала эффективные технические решения, внедренные на
автомобиле ГАЗель для повышения функциональности при беспилотном
режиме вождения. Команда-победитель получила право участвовать в
Европейских испытаниях роботов ElRob в 2016 году. Команда Фауст
Московского авиационного института стала обладателем номинации
Лучшее техническое решение.
Номинации испытаний распределились следующим образом:
1. Командная работа команда ФГУП НАМИ,
2. Награда от судей УМиКо (Москва, Университет
машиностроения),
3. Системный подход команда МК-Ультра-НН (сборная команда
Нижегородского автомеханического техникума и НГТУ им. Р.Е.
Алексеева),
4. За настойчивость в достижении цели команда KSTA Team
(Ковровская государственная техническая академия),
5. Лучший в классе Свободный команда LOOK (Рязанский
государственный радиотехнический университет).
В состязаниях приняли участие 18 студенческих команд ведущих
вузов Москвы, Нижнего Новгорода, Рязани, Коврова и Владимира.
Большинство команд неоднократно участвовали в РобоКроссе на
автомобилях ГАЗель, подаренных Горьковским автозаводом Группы ГАЗ
самым активным участникам программы Робототехника.
Впервые в рамках основных испытаний автономных транспортных
прошел Открытый кубок Сколково, в котором команды
продемонстрировали возможности своих роботов в упражнении
Параллельная парковка в полностью автономном режиме. Победителем
стала команда Avrora Robotics (КБ Аврора, Рязань), которая получит
грант от Фонда Сколково.
РобоКросс-2016
РобоКросс-2016
с 11 по 15 июля 2016 года на полигоне Автозавода ГАЗ, Берёзовая
пойма, г. Нижний Новгород, проведены седьмые Ежегодные полевые
испытания беспилотных систем РобоКросс-2016
Наибольшее количество баллов в направлении Наземные транспортные
средства набрала команда Фауст Московского авиационного института,
второе место заняла команда KSTA Team (Ковровская государственная
техническая академия), третье место Студенческое конструкторское
бюро Роботизированные транспортные системы (СКБ РТС, сборная
команда Нижегородского автомеханического техникума и Нижегородского
государственного технического университета).
Лучшими командами, использовавшими автономный режим вождения,
стали команды СКБ РТС и команда Аврора Рязанского государственного
радиотехнического университета.
В направлении Беспилотные летающие средства победителем стала
команда Коптер Express (Москва), в направлении РобоКросс-технологии
команда Le Talo (Le Talo Robotics, Владимир).
Кубок Сколково за демонстрацию робототехнических систем помощи
водителю получила команда ФГУП НАМИ.
В состязаниях приняли участие 14 студенческих команд ведущих
вузов Москвы, Нижнего Новгорода, Рязани, Коврова, Владимира и
Санкт-Петербурга.
В ходе основных соревнований на специально подготовленном
испытательном полигоне участники продемонстрировали способность
транспортных средств самостоятельно, в полностью автоматическом или
телеметрическом режимах выполнять комплекс упражнений на земле и в
небе, руководствуясь данными Глобальной навигационной спутниковой
системы (ГЛОНАСС). Для команд была смоделирована реальная ситуация,
при которой беспилотный автомобиль в автономном режиме должен
пройти трассу с препятствиями, выполнить развороты и другие
маневры, в том числе, и с использованием задней передачи. Летающие
беспилотные платформы, помимо демонстрации самостоятельного полета,
выполнили задание по доставке груза в определенную точку местности
на основе заранее заданных координат-меток.
В этом году основной регламент был расширен новыми заданиями по
автоматизированным системам помощи водителю ADAS (Advanced driver
assistance systems).
В рамках РобоКросса-2016 впервые стартовало новое направление
РобоКросс-технологии, в котором команды представили экспертам
Группы ГАЗ проекты, ориентированные на решение конкретных задач в
области беспилотных и интеллектуальных систем с возможностью
реализации в ближайшей перспективе. Наиболее востребованными темами
в этой области являются системы предупреждения о сходе с полосы
движения, помощи при смене полосы движения, предупреждения о
фронтальном столкновении, автоматического торможения.
РобоКросс-2017
РобоКросс-2017
Фонд Олега Дерипаски Вольное Дело и Группа ГАЗ при участии фонда
Сколково провели
с 03 по 07 июля 2017 года на полигоне Автозавода ГАЗ, Берёзовая
пойма, г. Нижний Новгород восьмые Ежегодные полевые испытания
беспилотных систем РобоКросс-2017.
Абсолютным победителем среди студенческих команд в направлении
РобоКросс-транспортные средства признана команда CVL Robotics
Московского политехнического университета, лучшей командной среди
разработчиков и коммерческих организаций стала команда ФГУП НАМИ, в
специальной номинации За волю к победе победила команда
Нижегородского государственного технического университета.
В состязаниях приняли участие 19 студенческих команд ведущих
вузов Москвы, Нижнего Новгорода, Рязани, Коврова, Владимира,
Оренбурга, Самары и Санкт-Петербурга. В РобоКроссе участвовали не
только наземные транспортные средства, но и летающие беспилотные
системы.
В этом году основной регламент был расширен новыми заданиями по
автоматизированным системам помощи водителю ADAS (Advanced driver
assistance systems). Стратегия развития Группы ГАЗ предусматривает
планы по оснащению транспортных средств системами активной помощи
водителю с целью снижения рисков дорожно-транспортных происшествий,
происходящих по вине человека.
В ходе основных соревнований на специально подготовленном
испытательном полигоне участники продемонстрировали способность
транспортных средств самостоятельно, в полностью автоматическом или
телеметрическом режимах, выполнить комплекс упражнений на земле и в
небе, руководствуясь информацией глобальной навигационной
спутниковой системы ГЛОНАСС. В задании для команд была
смоделирована реальная ситуация, при которой беспилотный автомобиль
в автономном режиме должен пройти трассу с препятствиями, выполнить
развороты и другие маневры, в том числе и с использованием задней
передачи. Летающие беспилотные платформы, помимо демонстрации
самостоятельного полета, выполняли задание по доставке груза в
определенную точку местности на основе заранее заданных
координат-меток.
В направлении РобоКросс-технологии команды представили экспертам
Группы ГАЗ проекты, ориентированные на решение конкретных задач в
области беспилотных и интеллектуальных систем с возможностью
реализации в ближайшей перспективе. Наиболее востребованными темами
в этой области являются системы предупреждения о сходе с полосы
движения, помощи при смене полосы движения, предупреждения о
фронтальном столкновении, автоматического торможения.
РобоКросс -2018
РобоКросс -2018
Фонд Вольное Дело и Горьковский автозавод с 9 по 12 июля 2018
года будут проводить в Нижегородской области IX Ежегодные полевые
испытания беспилотных систем РобоКросс-2018. В состязаниях примут
участие 25 студенческих команд ведущих вузов Москвы, Нижнего
Новгорода, Иркутска, Рязани, Саратова, Ульяновска, Владимира,
Самары и Санкт-Петербурга. Соревнования пройдут на испытательном
полигоне Горьковского автозавода.
В рамках РобоКросс-2018 будут проведены следующие испытания:
Основные:
-
Испытания мобильных робототехнических систем беспилотные
транспортные системы выполняют задание на специально оборудованной
трассе полигона.
-
ADAS для роботизированных систем дополнительные испытания
мобильных робототехнических систем с элементами моделирования
реальных дорожных ситуаций.
-
Беспилотные летательные системы - 2018 испытания летающих
робототехнических систем транспортировки и мониторинга.
-
"UNIOR RACE -2018" - соревнования беспилотных робототехнических
транспортных средств на основе готовых решений-конструкторов
(например "Юниор").
Пилотные:
- Городская маршрутка испытания на полигоне с имитацией условий
городской инфраструктуры в рамках регламента ADAS для беспилотных
транспортных средств.
Как и в прошлом году основной регламент будет расширен новыми
заданиями по автоматизированным системам помощи водителю ADAS
(Advanced driver assistance systems). Стратегия развития
Горьковского автозавода предусматривает планы по оснащению
транспортных средств системами активной помощи водителю с целью
снижения рисков дорожно-транспортных происшествий, происходящих по
вине человека.
В связи с этим важной задачей компании является подготовка
кадров, имеющих компетенции в разработке, адаптации и практическом
применении функций ADAS (предупреждение о выходе из полосы
движения, экстренное автоматическое торможение перед внезапно
возникшим препятствием, интеллектуальное ограничение скорости,
предупреждение об опасности наезда, обнаружение и распознавание
дорожных знаков, боковое видеонаблюдение мониторинг слепых зон,
мониторинг усталости и состояния водителя, помощь в пробке и
др.).
Отметим, что на данный момент многие участники программы
Робототехника в прошлом, ныне работают на предприятиях Горьковского
автозавода.
В ходе основных соревнований на специально подготовленном
испытательном полигоне участники должны продемонстрировать
способность транспортных средств самостоятельно, в полностью
автоматическом или телеметрическом режимах выполнить комплекс
упражнений на земле и в небе, руководствуясь информацией глобальной
навигационной спутниковой системы ГЛОНАСС. Согласно заданию для
команд будет смоделирована реальная ситуация, при которой
беспилотный автомобиль в автономном режиме должен пройти трассу с
препятствиями, выполнить развороты и другие маневры, в т. ч. и с
использованием задней передачи. Летающие беспилотные платформы
помимо демонстрации самостоятельного полета должны выполнить
задание по доставке груза в определенную точку местности на основе
заранее заданных координат-меток.
Также в этом году на площадке полигона также пройдут состязания
Unior Race соревнования модульных конструкторов малых беспилотных
робомобилей Юниор на специальном поле, которое моделирует городскую
обстановку. Команды отработают все основные элементы программного
обеспечения и технических решений, которые могут быть
масштабированы на полноразмерные беспилотные автомобили.
Беспилотные робомобили Юниор Стандарт (производитель Aurora
Robotics) студенческие команды получили в качестве приза от Фонда
Вольное Дело за победу в направлении AutoNet 18+ во время
Всероссийского робототехнического фестиваля РобоФест-2017.
Судьями соревнований являются инженеры-конструкторы Группы ГАЗ.
Все регламенты разработаны при активном участии объединенного
инженерного центра Горьковского автозавода и ресурсного центра
программы Робототехника. Большинство команд неоднократно принимали
участие в РобоКроссе на автомобилях ГАЗель, подаренных "Горьковским
автозаводом" самым активным участникам программы Робототехника.
Ссылки на публикациях в СМИ:





















































































































































































 Алгоритмы ECO Driving
Алгоритмы ECO Driving

 Система РРС сама заранее сбросит скорость
перед перекрестком.
Система РРС сама заранее сбросит скорость
перед перекрестком.













































































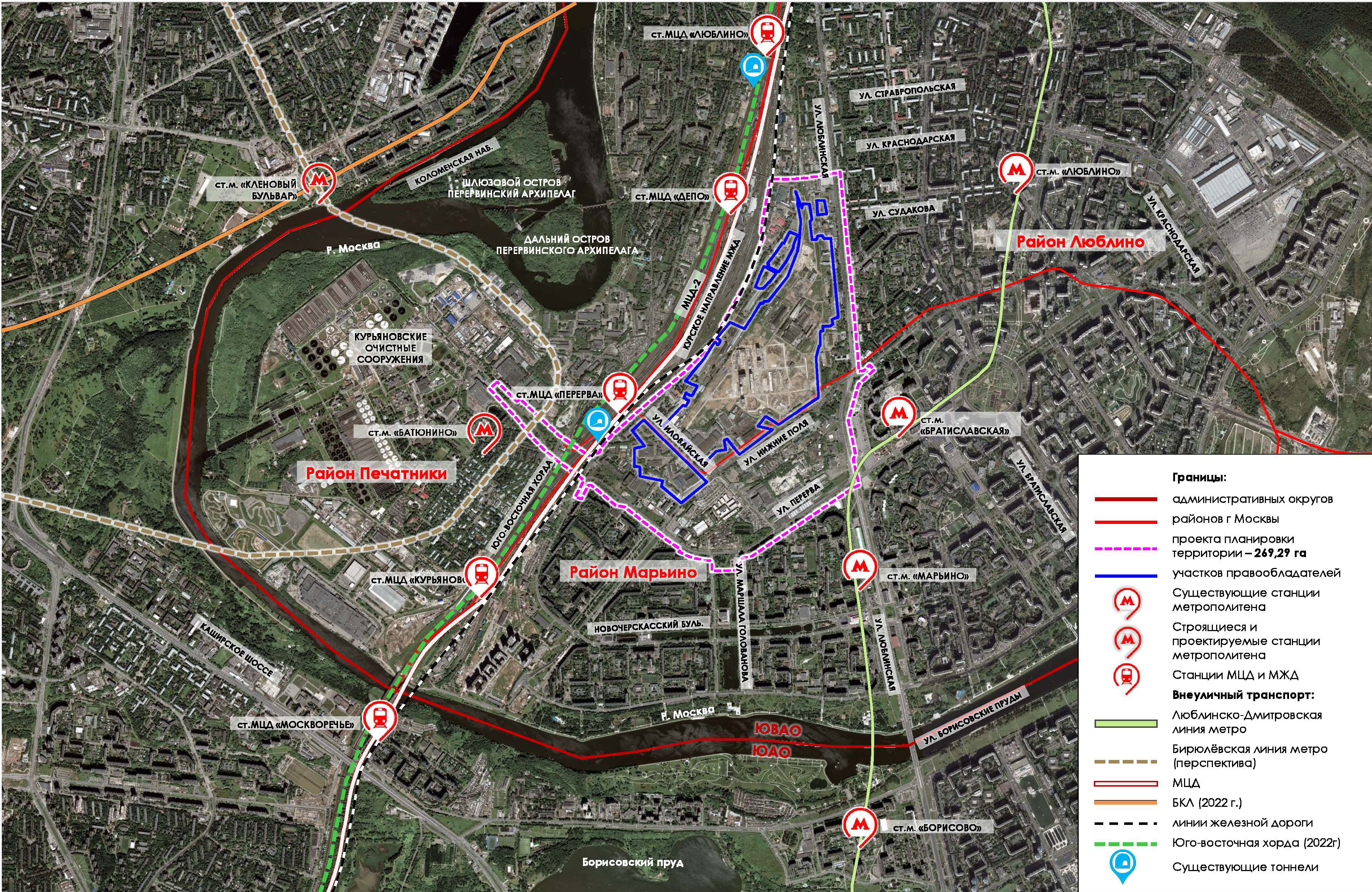
 Проект Бирюлевской линия метро обозначен
желто-красным цветом
Проект Бирюлевской линия метро обозначен
желто-красным цветом


.") По порядку: три башни, секционные
многоквартирные дома, большой внутренний двор, маленькие внутренние
дворы (квартальная застройка).
По порядку: три башни, секционные
многоквартирные дома, большой внутренний двор, маленькие внутренние
дворы (квартальная застройка).






