, Wes Borland (Limp Bizkit), Jame Shaffer (Korn), ну и я с педальками")
CJ Pierce (Drowning Pool), Wes Borland
(Limp Bizkit), Jame Shaffer (Korn), ну и я с педальками
Привет, Хабра!
Сегодня одолела ностальгия и хочу рассказать, как делал
устройства для музыкантов педальки-контроллеры, наделяющие
музыкальный процессор Digitech Whammy новыми возможностями.
Устройства мало кому нужны, но кому нужны то позарез)
Этот проект мне очень дорог, потому что с него началась
настоящая страсть к созданию чего-то нового. И хоть я давно уже не
брался за паяльник, а основное время посвящаю развитию в управлении
продуктом, всё ещё не оставляю фантазии о фееричном возвращении в
music hardware, которое сделает немного шума в чахнущем царстве
рока.
Да и перед именитыми ребятами (на фото, например, CJ Pierce из
Drowning Pool, James "Munky" Shaffer из Korn и Wesley Borland из
Limp Bizkit, ну и я с девайсами), признаться, стыдно, что пропал на
целых несколько лет ни слуха от меня, ни духа о новых
устройствах.
Удачно сложилось, что сегодня же есть 3,5 часа в самолёте, так
что настало время офигительных историй расскажу, как появились эти
железки реально из мусора. Курьёзы и неудачи, какие устройства
хотел и что получилось, как они оказались у топ-музыкантов мира и
почему я отложил такие крутые штуки в долгий ящик.
Возможно это смотивирует кого-то вернуться и доделать свои идеи,
а кому-то просто поднимет настроение. Итак, вперёд! Точнее назад, в
2010 год...
Педаль с Марио
Год 2010 был жутко насыщенным (как, впрочем, и все остальные),
потому что я работал параллельно:
а) Продавцом в музыкальном магазине,
б) Администратором в концертном агентстве,
в) Был владельцем двух репетиционных баз и совладельцем магазина
игрушек,
д) Играл рок с бандой за какие-то деньги и так далее.
В один из выходных, проснувшись в Музторге, мой коллега Кузьмич
показал видео на YouTube диковинной и взрывающей голову педальки от
Molten Voltage. Это был midi-контроллер для Digitech Whammy,
который превращал питч-шифтер в арпеджиатор.
Стоила педаль 100$ (3 000 по тем временам) и платить такие
бешеные деньги за девайс было большим расточительством. А так как я
увлекался программированием микроконтроллеров (и даже сделал
подсветку днища для друзей,
звёздное небо для клуба "Шоколад" и другие кринжовые штуки из
2007-ого), то сходу предложил за трёху сделать педаль сильно
лучше.

Мне до сих пор плохо верится, что это
сработало. Зацените стойки для платы, напиленные из шариковой
ручки. Крутилка от выброшенного осциллографа, покрашенная
цапон-лаком и отполированная пастой ГОИ. Ну и так далее
Папа у меня инженер и с детства дома были кучи радиодеталей и
плат, а я паял всякие нехитрые приспособления. Из Музторга была
позаимствована Digitech Whammy, в
радиомагазине куплен PIC16F628, собрана схема чисто из советских
деталей, написана программа на ассемблере и готово. На всё про всё
пара месяцев работы по вечерам.

Получилась такая штука. Это уже
мелкосерийный образец ручка справа заводская
Всё делалось дома вручную. Сложнее всего было напилить
квадратные отверстия для разъёма питания и окошко для цифры. Окошко
с внутренней стороны было закрыто приклеенным куском прозрачной
шайбы, которая всегда была на шпинделе компакт-дисков, помните
такую?
Программная часть вообще без каких-то новшеств. Пресеты в
EEPROM, на старте читаем активный, загружаем в RAM. Раз в несколько
миллисекунд опрашиваем кнопки и рисуем на экране чиселку. Конечный
автомат прямо в прерывании таймера за микросекунды делает всю
работу + считает темп для функции Tap Tempo (которая, конечно,
подвирала).
Описываю так подробно, чтобы вы оценили масштаб дальнейшего
изумления. Да, с точки зрения функциональности штука получилась
более продвинутая, чем у заморского аналога. Но как она была
сделана, бог мой, резисторы млт, конденсаторы из китайских
приёмников, на первых педальках ножные кнопки были самоделкой из
советских микропереключателей, ну и платы, конечно, сфабрикованные
утюгом из позаимстованного со столешницы стола текстолита.
Сразу было сделано 3 таких педали двум друзьям и себе. Мне
девайс не понравился не считал темп в bpm, плохие возможности
программирования, мало программ, работал только с одним типом
Whammy. Тем не менее, я снял видео и тоже залил в YouTube типа
зацени, Молтон Вольтейдж, пацаны с лебедевочки тоже могут!
На видео добавляет стиля миди-шнурок, свитый из трёх отдельных
проводов, советские аудио-разъёмы DIN-5, демо-версия
видео-редактора и порванный носок. Да, тогда YouTube многое
прощал.
Так вот, какое было удивление, когда мне начали писать люди из
разных стран с просьбами продать им такое же чудо-устройство. Я
сделал ещё пару штук. Потом ещё. Потом ещё и понял, что надо что-то
менять, потому что тратил на сборку слишком много усилий и хватит
это терпеть. Поднял цену (аж на 300 рублей) и заказал платы, потому
что ну достало их шлёпать утюгом.

Здесь уже фирмища платы заводские, с
защитной зелёнкой. Работали, как автомат Калашникова
Но само устройство мне всё ещё не нравилось. Слишком много
инженерных и конструктивных недостатков. И функциональности
маловато хотелось больше, ярче, веселее.
Тем не менее до 2013-ого года они продавались именно в таком
виде. Начали подтягиваться ребята с именами одна ушла Паше Додонову
в Дельфин. Одну подарил Стиву Ваю, когда он приезжал в Новосибирск,
но он ей скорее всего максимум ножку стола подпирает. Зато поиграли
с ним на гитарах, он и его менеджер Франко Пеона похвалили мой
Гибсон Лес Пол, ух хороший вечерок был. Но не об этом.

Это Рома на концерте, но видна уже новая
педалька чёрная
Ещё одна ушла Роме Хомутскому в 7Расу. А я стал задумываться,
что пора бы сделать следующую версию на порядок круче и для этого
нужно подтянуть технологии и инструментарий. И в следующий раз,
когда 7Раса поехала в тур в Сибирь, купил в Москве на Авито макбук,
чтобы учиться на нём работать и впитывать магию Эпол. Попросил
ребят привезти мне его заодно в Новосиб типа, всё равно ж сюда
едете. Вот такая звёздная доставка получилась.
Главные ошибки
В моей жизни тоже происходили изменения начали расти волосы в
странных местах стал больше кататься с артистами, выполняя
функции менеджера на шоу. Своих же концертов, наоборот, стало
меньше и в голове начали появляться мысли про занятие в будущем, а
не про то как здорово мы вчера качнули тысячник и какой удался
бодрый стейдж дайвинг.
Запущенные мамкины бизнесы не приносили удовольствия, а продажи
коробочек с Марио, наоборот, подогревали мысль о том, что можно
производить устройства, продавать их и в ус не дуть.

Мне безумно приятно было получать
сообщения, как слева. А справа типичный вид педальки первой версии,
которые отправлялись к клиентам
Но педальки продавались редко, и я придумал, что если их
улучшить, то получится ну совсем бомба и станут они разлетаться как
горячие пироги. Да, на этом месте можно начать загибать пальцы,
подсчитывая допущенные грандиозные ошибки. Но мне за них не стыдно
тогда я понятия не имел, что такое IT, как делать продукт, чем
бэкенд отличается от фронтенда, а главным инструментом
программирования был паяльник. Мне просто хотелось делать и
продавать уникальные штуки и я делал и продавал.
Итак, краткий список принципиальных улучшений был намечен
такой:
сделать точнейшую поддержку темпа в bpm. Мы же говорим про
арпеджио, значит надо чтобы эффект точно попадали в контекст
трека;
поддержать все типы актульных тогда (да и сейчас) Digitech Whammy,
а их 4 штуки;
сделать овер-дофига пресетов и чтобы их было легко программировать,
как на самой педальке, так и на компьютере;
сделать полную поддержку MIDI, чтобы педаль встраивалась в цепочки
других устройств, синхронизировалась по темпу, могла сама управлять
темпом других устройств и т.д.
работать устройство должно от любого блока питания и от батарейки и
ещё и контролировать её разряд, ну и так далее.
Было ещё много других хотелок, но даже эти уже слабо
ассоциировалось с резисторами млт и стойками из шариковых ручек.
Ещё тогда вышел iPhone 4 и мне, конечно же, хотелось делать
продукты в стиле Apple чтобы они были офигенные и на голову
опережали конкурентов по желанию ими обладать. В общем, наметился
переход на более продвинутую технологию, как в hardware, так и в
software.

Оказалось, что делать такие платки в
домашних условиях нет большой сложности
С железом определился легко. Это точно должна быть 2-сторонняя
плата и smd монтаж, чтобы получить максимум от домашнего
прототипирования плат утюгом. Дальше купил паяльную станцию с
феном, сделал несколько плат и обнаружил, что 0805 это раз плюнуть,
довольно легко запаиваю 0603, а вот 0402 уже тяжко.
С процессором чуть сложнее. Я остался на микроконтроллерах PIC,
потому что к тому времени начал мыслить их ассемблером, и он меня
полностью устраивал в голове просчитывал нужное количество тиков в
прерываниях, чтобы получить real time точность и т.д. Но сам камень
итеративно менял несколько раз, потому что раздувались хотелки и в
итоге пришёл к PIC16F1939 в корпусе TQFP. Почти что максимум, что
мог предложить Microchip на 8-bit архитектуре.

Это я купил фотоаппарат, чтобы записывать
качественное видео и сфотал партию процессоров и винтики для
верхней крышки, на поиски которых потратил немало времени, но они
просто ахрененные
Но самое сложное оказалось с software. Я несколько недель маялся
и принципиально не мог придумать, как мне сделать так, чтобы все
задуманные функции выполнялись параллельно, контролируемо и точно.
Напомню, я не был программистом. Я был рокером.
Здесь нужно сделать лирическое отступление про образ жизни.
Тогда я сдружился с моим лучшим другом Славой, очень известным в
узких кругах CG. Слава как-то решил, что хочет делать 3D-мультики
ну хотя бы на уровне Pixar и начал делать. Мы с ним быстро опознали
друг в друге упоротых людей и сблизились настолько, что я постоянно
жил у Славы. Днём в основном мы мотались по делам, а ночи напролёт
дули кофе и пилили проекты. Кстати, какой-то мультик не без помощи
Pixar мы в итоге сделали, но это совсем другая история)

Позже мы реально делали мульт. Собирали
аниматик, строили рендер-ферму, но об этом как-нибудь в другой раз
В итоге как-то поздно вечером я вернулся домой и папа мне
подсунул статью из технического журнала. Он знал, что я чёто-то там
делаю с микроконтроллерами и время от времени подкидывал
интересные, на его взгляд, материалы.
И каково было изумление, когда я понял, что в статье описывается
решение моей боли а именно, как в операционной системе работает
планировщик задач. Я был ослеплён изящностью и красотой этой идеи,
и тут же сел писать демку планировщика. Часам к четырём ночи она
была готова, я не думая прыгнул в машину и прикатил к Славе, нашёл
его сидящим с краснющими глазами за мониторами и, сбиваясь, в
эйфории рассказал про случившийся прорыв. Слава выслушал, посмотрел
оценивающе и сказал: "Иди спать, педрила". Так появилось гордое
название PeOS в пунктах преимуществ устройства и Pe это не
pedal.
Конечно, это было только начало пути, а дальше наступил сезон
гастролей и я параллельно начал зачитываться как детективом
"Операционными системами" Танненбаума и писать свой менеджер задач
core, вокруг которого строилась вся система.
Почему не взял готовый? Да тупой потому что. Даже Git не знал
зачем нужен. Ну и хотелось во всём разобраться, сделать идеальный
девайс.
Хорошо запомнил ощущение сюра, как в Томске Борис Гребенщиков с
Аквариумом изрядно накидались в гостинице, плясали на столах, а я в
центре этой вахканалии пишу на ассемблере свою операционную
систему.

Как вам такое? Самый жёсткий был модуль
экрана со всеми шрифтами и анимациями там около 7 тысяч строк
Выбор ассемблера привёл к понятной проблеме. Вы видели
когда-нибудь абсолютно нечитаемый код? Скорее всего вы видели
эталон достижений в области программирования по сравнению с тем,
что стало результатом работы. 30+ килобайт ассемблерного кода это
очень много.
Но дальше сюр будет только крепчать.
Прототипы
Начало работы полностью происходило в симуляторе, но довольно
скоро дошло время и до проектирования схемотехники. Схему для
первой версии педали чертил в простейшем Sprint Layout. Для второй
же версии потребовался инструмент серьёзнее изучил Eagle и разводил
платы там.
Мне хотелось странных решений обойтись без кнопки включения, но
чтобы педаль могла выключаться с батарейкой внутри. Сделать хитрую
схему питания, протестировать возможности разных копеечных экранов
от телефонов, сделать автоматической определение педали по
(однонаправленному, на секундочку) протоколу MIDI и т.д.

Слева россыпь прототипов, а справа
финальный в демо-корпусе
Прототипов было с десяток. Сначала неказистые макеты частей
системы, потом начал объединять их на одной плате с прицелом
засовывания в корпус. Но даже таких было штук 5 или 6 перед
финальной версией.
В итоге устал от того, что провода постоянно рассыпаются и
отваливаются и придумал для прототипов макет-корпус из орг-стекла,
который и стал уже полноценным прототипом педали. Он постепенно
обрастал функциональностью, тестировался в разных условиях без
риска повреждения кишков.

Ручной работы с корпусами, да и со всей
педалью прям хватало. Но мне реально нравилась каждая педаль,
которая в итоге выходила за пределы моей комнаты
Производство корпусов на этот раз было не полностью ручным.
Вручную пилил только круглые дырки на боках. Для верхней панели
сделал чертёж и отдавал на гидроабразивную резку. Дальше заказывал
наклейки и сверху накрывал оргстеклом, тоже вырезанным по
чертежу.
")
Это разная графика на разных экранах.
Логотип я потом переделал на более строгий. Но больше всего меня
прикалывала иконка ноги, которая символизировала шаг. Прикольно)
UI весь нарисовал сам. А потом перерисовал. Тогда мы со Славой
время от времени нехило рубились в танки, поэтому в педальке все
цифры стали трафаретными, как будто с военной техники.
Для соединения педали с компьютером разобрался с Objective-C и
написал программу (о, боги, как-то я заглянул в код и чуть не
заплакал кровью) под Mac OS. Помню, как у меня бомбило, когда
узнал, что в Objective-C есть специальный объект NSNumber для
числа. Я привык в 1 байт упаковывать 4-битное число и 4 буля и мне
это показалось кощунственным разбазариванием ресурсов.
Несколько дней потратил на написание пресетов и сочинения демок
для каждого из пресетов. Записал с ними видео уже без порванного
носка и смонтировал в iMovie. Но и там есть смешной факт левый
кроссовок, которым я давлю на кнопки (чтобы не было носков в кадре)
у меня был в единственном экземпляре. Правый я порвал практически
сразу на футбольном сражении, поэтому кроссовок был чистый и
презентабельный ещё не успел его сносить.
Было ещё несколько ударов судьбы, которые чуть не валили
уверенность в блестящем будущем проекта с ног. Точно помню два.
USART
Педалька должна была встраиваться в
MIDI-цепочку. MIDI это последовательный однонаправленный протокол с
токовой петлёй на физическом уровне. Мне нужен был 1 MIDI-вход для
получения данных извне, 1 MIDI-выход для отправки данных вовне и 1
MIDI-выход для отправки данных в процессор Whammy, собственно для
прямой функции девайса, ради чего затевался сыр-бор.
Я был абсолютно и непоколебимо уверен, что USART-ов в PIC16F1939
ну минимум 2 или 3, а оказалось, что ОН ОДИН. Это случилось, когда
почти вся функциональность была закончена и более-менее
протестирована, а оставалась только реализация MIDI. Я настолько
тогда охренел, что растерялся.
Добавлю контекста денег тогда было не то чтобы много, а точнее
дно было тотальное. И процессоров я уже заказал пару десятков и это
было сильным ударом.
В общем, выкрутился ужасно. На выход USART'а добавил
переключатель физических выходов MIDI на транзисторе. И в
зависимости от назначения байт отправлялся в один или другой выход.
По факту предельная скорость передачи данных снизилась в 2 раза, но
на практике с этим решением вообще никаких проблем.
Деление на 3
Когда мы говорим про
синхронизацию темпа с другими источниками, то нужно уметь очень
быстро подстраивать темп под генератор синхроимпульсов примерно
сотню раз в секунду. И вообще задача это не сильно сложная, но в
музыке есть триоли то есть 3 ноты за долю.
В итоге задача свелась к делению 16-ричного числа на 3. А
дешёвый 8-битный контроллер не то чтобы вообще умел это делать. Как
бы там есть сложение, вычитание и сдвиг, которым можно делать
умножение и деление на степень двойки. Но не другого числа.
И опять бессонные ночи в попытках решения задачи за
прогнозируемые микросекунды. Крутил в голове цифры и так и этак и в
итоге придумал алгоритм, которым страшно
гордился, пока не узнал, что это какой-то супер-базовый алгоритм,
который программисты изучают на 1-ом курсе. Что ж, ну ок.
Релиз
Педаль вышла в свет в 2014-ом. Для релиза первой версии заказал
10 плат у китайцев за 5 долларов. Пришло 11, что безмерно
обрадовало. Платы собрал сам и после самодельных плат с трещинами в
дорожках и недотравами это был просто глоток свежего воздуха.

Справа изготовление платки, два прототипа
разного уровня проработки. Чёрный уже предсерийный
Цену выставил, как мне тогда казалось, солидную 5 000 за
коробочку. Штук шесть у меня купили в первый же день ближайшие
знакомые. Ощутил запах победы и что всё не зря. Но дальше продажи
полностью остановились. Надо было что-то делать.
Не долго думая, решил использовать способ, сработавший раньше,
но с небольшим дополнением. Педаль сфотографировали у знакомого
фотографа по-моему за бутылку виски, которая и фигурирует на фотке.
Мой друг собрал сайт, который можно посмотреть в веб-архиве. Угадайте, чего
не найти на сайте? Правильно, кнопки купить!)
Дальше записал длинное видео с объяснением всех функций,
доступных в педальке. Думал показать здесь тот самый видос с
разбором всех функций, но лучше добавлю видео ребят, которые
встраивали дикие звуки D2 в свою музыку
Залил обе версии на ютюб и... Почти ничего не произошло. Да,
заказов стало чуть больше, в среднем по одному-два в неделю, но
этого всё равно было мало, чтобы выходить на какой-то конвейер. И
для жизни ж ещё деньги зарабатывать как-то надо было.
Звёздный сюр
К этому времени стало уже понятно, что ввязался я в длинную
драку и быстрых побед не будет. Идея возникла такая надо, чтобы
топ-музыканты использовали педали в написании музла и после этого
уже их фанаты и кореша из тусовки точно начнут заказывать коробочки
пачками. Ну и желательно чтобы в новой тогда соц сети инстаграм
педальку разместили.
Вообще, тема оказалась в целом рабочей, но мне не хватило опыта
и уверенности, чтобы её реализовать в полной мере. Тем не менее,
произошли крутые события, которыми я горжусь до сих пор.

Это Уэс на NAMM 2014. Сам я туда, конечно
же, не попал, но Уэс здорово мне помог, век не забуду
Hed P.E.
Одним из первых во внимание попал
Wesley Geer (экс Hed P.E.). Он приезжал в Новосибирск вместе с
Korn, оказался супер-общительным чуваком и с ним удалось посидеть в
баре. Договорились, что я отправлю ему педаль на NAMM с кем-то из
Нск (сам я не могу поехать, бабок не было), так и вышло. До сих пор
время от времени переписываемся.
Drowning Pool
Я долго работал в концертной индустрии, плюс мы много играли рок,
поэтому, конечно, знал почти всех организаторов, прокатчиков и
промоутеров, и попробовал через них рассказывать о своих педальках
приезжающим топ-музыкантам.
Так произошло с группой Drowning Pool. Их гитарист CJ Pierce
активно использовал Digitech Whammy в музыке и был отличным
кандидатом под "моего" артиста. Через знакомых рассказал их
менеджеру про педаль, но так я был вообще на мели, не мог педаль
подарить. В итоге менеджер купил педальку и мы здорово пообщались с
CJ-ем. Я объяснил ему все функции девайса, он офигел и предложил
помочь их продавать в Штатах. Я обрадовался, но опять не хватило
опыта дожать тему. Мы просто потерялись.

Та самая Вамми
Но из той встречи я вынес неожиданный бонус. Моя педалька это
контроллер для Whammy, который поддерживал 3 вида процессоров. Но
своих Whammy у меня тогда не было. И если пятую версию было найти
легко, то четвёртую постоянно приходилось одалживать, чтобы
проверить новую партию педалей. А у СиДжея тогда в туре сломалась
его Whammy IV. Я его не просил, но он просто взял расписался и
подарил её мне.
Я так обрадовался, ппц. Починил её дома, аккуратно почистил,
чтобы сохранить историческую задроченность и до сих пор тестирую на
ней новые девайсы. На фотке в заголовке она на заднем фоне красная.
Помните, в самом начале фильма XXX Вин Дизель сбрасывает в пропасть
красный корвет С5 под песню "Let the body hit the floor"? Ещё такой
мем был с попугаем. Кароче это та самая Whammy, которая в их песнях
записана.
Наив
Уже не помню, как продал педальку
Валере Аркадину из Наива и Матрикса. Но это один из российских
музыкантов, который очень много экспериментировал с её звуком. Она
вошла в песню "На пределе", Валера написал большое произведение на
заказ с её использованием, рассказал о ней в журнале In/Out.
Кароче, Валера, каждый раз когда ты звонишь, чувствую безумную
радость и уважение, но и угрызения совести, что до сих пор не
выпустил новых девайсов.
Korn
Дальше узнал, что ещё раз приезжают Korn и попросил Wesley
рассказать о педальке Хэду и Манки. Он не обломался и Манки вписал
меня в список приглашённых группой гостей в Нск. К сожалению, Хэд
тогда свалился с камнями в почках в Красноярске и остался там в
больнице, так что не пообщались, но педалек я всё равно подарил
две.

Дядьки оказались очень адекватными увлечёнными
людьми
Это была очень странная встреча на стадионе в Нск мы болтали с
Манки, подошёл Джонотан Дэвис и восхитился педалью, рассказал про
свой второй проект Killbot. В итоге Манки записал мой номер
телефона и email, мы обменялись контактами и я ушёл даже не
подозревая, что вообще произошло сейчас.
Crosses и Deftones
Как-то на даче я помогал
родителям, копал картошку, и пошёл посидеть в тенёк, потому что
припекало. На телефоне высветилось новое письмо заказ с сайта. Имя
заказчика Shaun Lopez. "Что за латинос?" подумал я.
У меня тогда вообще игра была такая когда приходил заказ,
особенно из-за границы, всегда внимательно изучал, что там за
группа, что играют, насколько интересные ребята.

Слева моя реальность в тот день, когда
Шон купил педаль. А справа она у него среди другого хлама
Так произошло и в тот раз. Но уже через несколько секунд я чуть
не навалил в штаны, потому что Шон оказался продюсером Deftones,
другом Чино Морено и музыкантом в one-man проекте Crosses. Ну а мы
тогда сильно фанатели по Deftones.
Я предложил ему 50% скидку за упоминание Smirnov Electronics на
его сайте и традиционную фотку в инстаграм. Собственно, Шон без
возражений выполнил свою часть обязательств.
Limp Bizkit
С лимпами была история прям по
касательной. Вес на самом деле Wes не использует Whammy в Limp
Bizkit и вообще её не то чтобы любит, но у него есть и другие
проекты. Плюс иногда он в инсте разыгрывает всякий ненужный ему
хлам.
 снимался в видео с козой и жигой")
Уэс и Фред в тот приезд здорово угорели.
Мы их свозили в деревню в местный колорит, где Уэс (да, на фото он)
снимался в видео с козой и жигой
Тем более, по приезду они показали себя прикольными ребятами
типами, которым хотелось лишний раз респектнуть. И то самое, что я
мог сделать подарить свою педальку. Собственно, так и вышло.
Заключение
Было ещё много приключений, связанных и с артистами и с
организацией аутсорса производства, и с утратой проектом моего
внимания, и как сайт у меня угнали и на нём появились вместо
педалей голые китайские тянки. Но полёт заканчивается мы уже кружим
над Новосибирском, поэтому, как минимум, с первой частью
закончу.
Как резюме, хочу подчеркнуть смотрите, как много я совершил
ошибок. Собрал почти все: от неверно выбранной технологической
платформы до совершенно не организованных продаж и развития,
профукал почти все шансы, упустил время. Но главное-то остаётся с
нами музыканты играют на педальках и раз в месяц-два до сих пор
ребята интересуются покупкой (безуспешно), как подтверждение, хоть
и очень локальной, но ценности.
Так что если у вас в голове есть идеи, но вы не знаете как их
сделать, просто делайте. Не думайте, делайте. А как начнёте делать
думайте, и тогда это точно приведёт к какой-нибудь крутой
истории.
И если вам было интересно прочитать и интересны другие аспекты
проекта, про которые я не успел написать лайк, шейр, коммент, я с
удовольствием отвечу на вопросы, а можт и созрею для второй части
статьи.
А если хочется порассматривать другие фотки про девайсы,
забегайте в инстаграм, там я время от
времени рассказываю о текущих проектах и инсайтах.
Stay Heavy \m/




















 Стоимость ATtiny2313
Стоимость ATtiny2313
 Стоимость ATmega8
Стоимость ATmega8
 Стоимость ATmega128
Стоимость ATmega128
 Стоимость ATmega2561
Стоимость ATmega2561
 Сравнение между собой ATmega128 и ATmega2561
Сравнение между собой ATmega128 и ATmega2561
 Схема платы
Схема платы
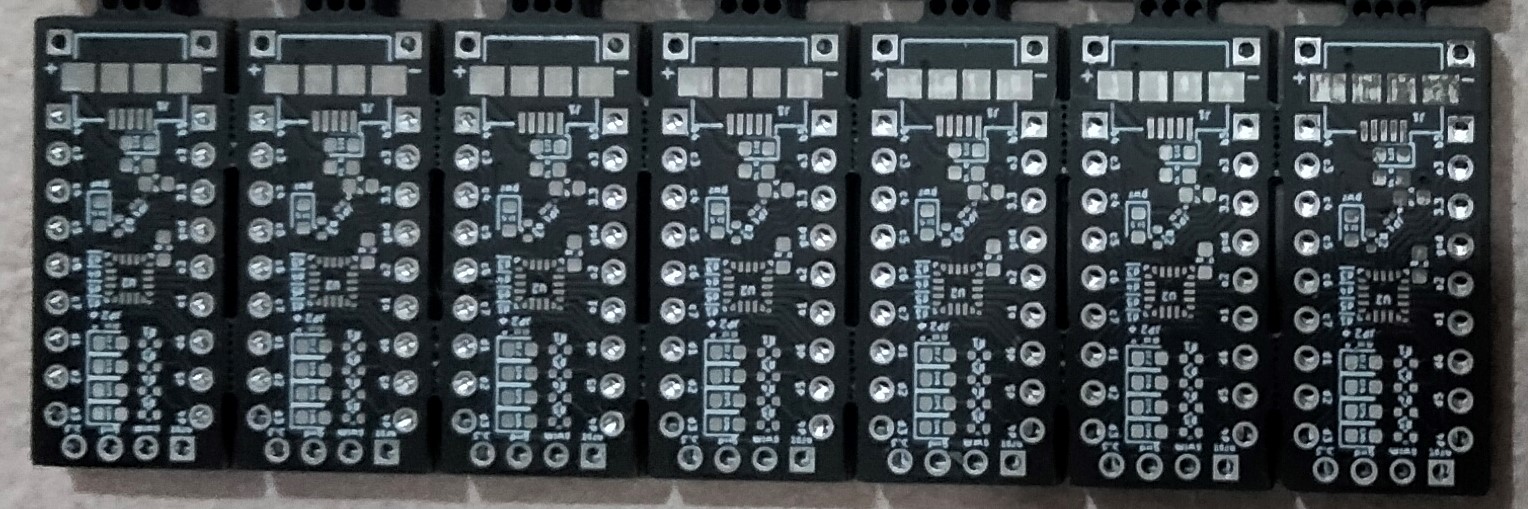
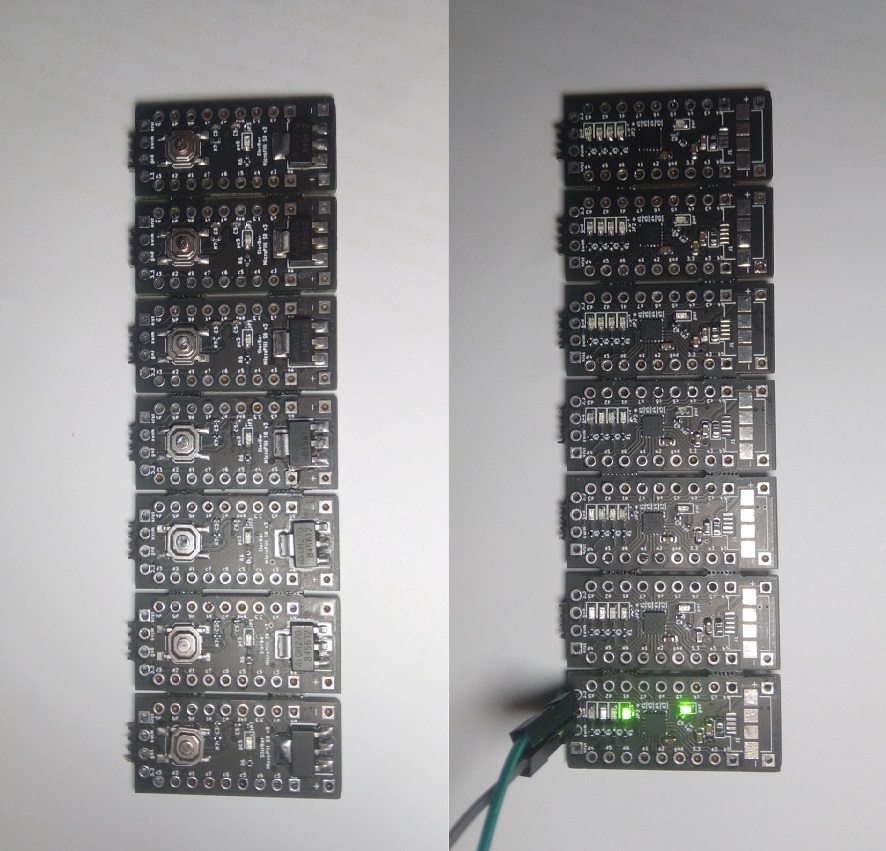
 Лицевая сторона плат
Лицевая сторона плат Задняя сторона плат
Задняя сторона плат
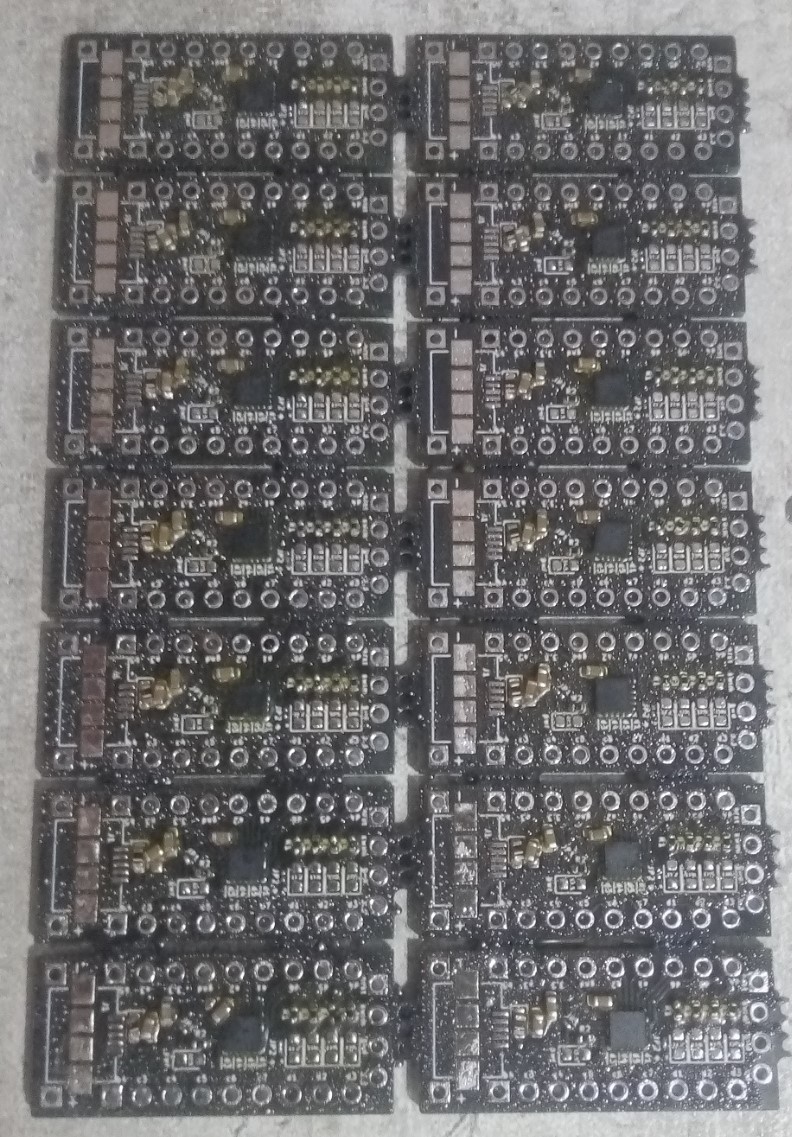
 Лицевая сторона плат после впаивания
компонентов
Лицевая сторона плат после впаивания
компонентов Задняя сторона плат после впаивания компонентов
Задняя сторона плат после впаивания компонентов
 Плата с модулем ADM488
Плата с модулем ADM488 Плата с модулем ADM488
Плата с модулем ADM488
 Плата с модулем nRF24L01+
Плата с модулем nRF24L01+ Плата с модулем nRF24L01+
Плата с модулем nRF24L01+








 Рис.1
Рис.1
 Рис.2
Рис.2
 Рис.3
Рис.3
 Рис.4
Рис.4
 Рис.5
Рис.5
 Рис.6
Рис.6
 Рис.7
Рис.7
 Рис.8
Рис.8
 Рис.9
Рис.9
 Рис.10
Рис.10


























 Вид трассировки с отображением всех 4-х слоев
Вид трассировки с отображением всех 4-х слоев
 Вид сверху и вид снизу
Вид сверху и вид снизу
 Расположение основных узлов на плате
Расположение основных узлов на плате
 Минимальные зазоры по умолчанию
Минимальные зазоры по умолчанию Минимальная, предпочтительная и
максимальная толщина проводников
Минимальная, предпочтительная и
максимальная толщина проводников Минимальные и максимальные размеры
переходных отверстий
Минимальные и максимальные размеры
переходных отверстий
 Слева диалог установки зазоров, справа
диалог установки минимального пути для класса цепей 220V
Слева диалог установки зазоров, справа
диалог установки минимального пути для класса цепей 220V

 Площадки со скруглениями
Площадки со скруглениями
 Посадочное место силового транзистора.
Красным обозначены открытые области маски для пасты.
Посадочное место силового транзистора.
Красным обозначены открытые области маски для пасты.

 Неоднозначная рекомендация по применению
термобарьеров
Неоднозначная рекомендация по применению
термобарьеров Важная рекомендация в отношении паяльной маски
Важная рекомендация в отношении паяльной маски






 v1
v1
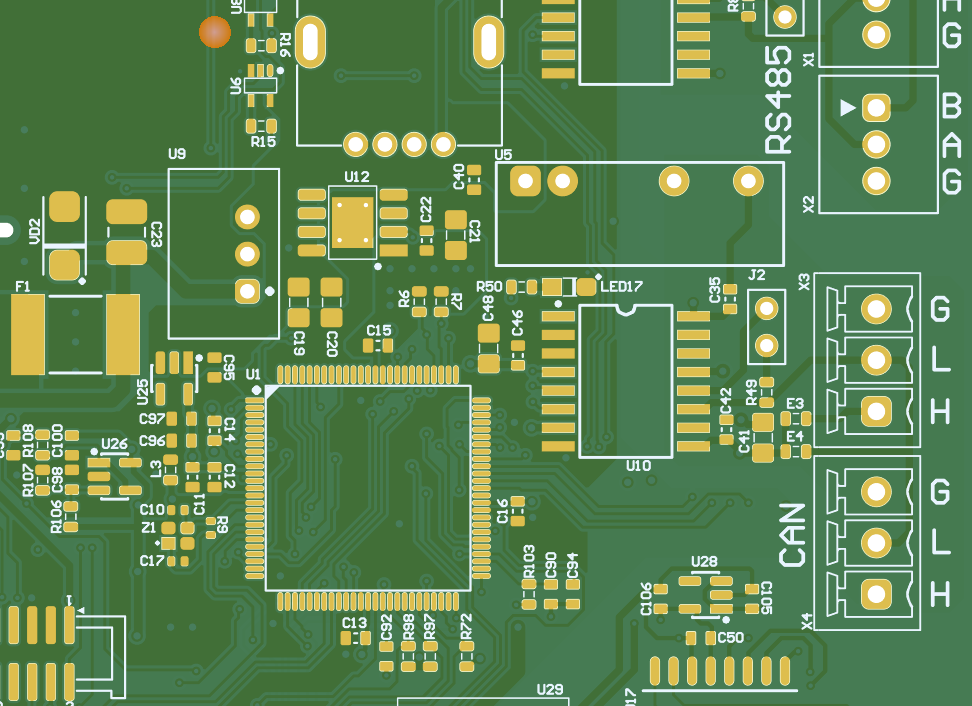
 Детальное фото печатной
платы
Детальное фото печатной
платы
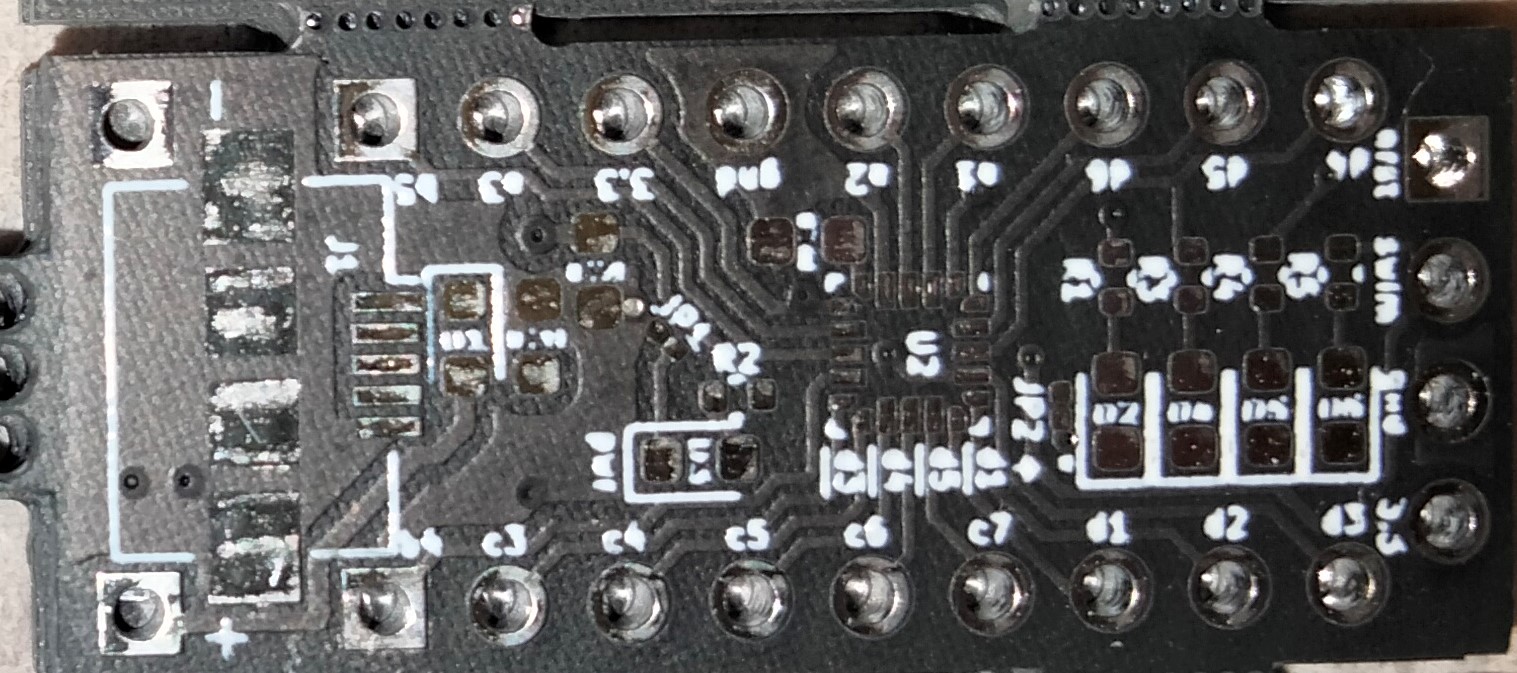

") Фото ужасное, но переснять не могу уже раздал их)
Фото ужасное, но переснять не могу уже раздал их)

 Распределение микросхем по типам.
Распределение микросхем по типам.
 Маржинальность типов микросхем
Маржинальность типов микросхем
 Лидеры среди производителей микросхем АЦП/ЦАП
Лидеры среди производителей микросхем АЦП/ЦАП
 Распределение разрядности микросхем АЦП
Распределение разрядности микросхем АЦП
 Распределение скорости преобразования микросхем АЦП
Распределение скорости преобразования микросхем АЦП
 Распределение разрядности ЦАП
Распределение разрядности ЦАП
 Распределение скорости преобразования ЦАП
Распределение скорости преобразования ЦАП
 Лидеры среди производителей микроконтроллеров
Лидеры среди производителей микроконтроллеров
") Соотношение 8, 16, 32 битных
микроконтроллеров (скорее всего неверное)
Соотношение 8, 16, 32 битных
микроконтроллеров (скорее всего неверное)

 Распределение тактовой частоты микроконтроллеров
Распределение тактовой частоты микроконтроллеров
 Распределение числа выводов микроконтроллеров
Распределение числа выводов микроконтроллеров





















