
Хочу рассказать о своем опыте проектирования, постройки и
эксплуатации лампового усилителя. Надеюсь, многие, прочитав статью,
найдут для себя что-то интересное, полезное и тоже захотят собрать
усилитель своими руками или наоборот, откажутся от этой затеи.
Хочу сразу сказать, я ни разу не аудиофил и теплым ламповым
звуком не страдаю. Интерес к ламповой технике у меня чисто
технический. Ну и немножко эстетический. Тихое гудение
трансформатора и теплый оранжевый свет ламп немного
завораживает.

До сего момента с ламповой техникой я сталкивался не очень
плотно, только в процессе ремонта какого-либо аппарата. И вот
захотелось попробовать самому что-нибудь создать с нуля. Вообще,
захотелось довольно давно, еще когда я учился в универе. Мне как-то
подогнали пару плоских дюралевых корпусов от встраиваемых компов,
которые как нельзя лучше подходили под то, чтобы на них собрать
усилитель. Корпуса эти долго лежали, выдержали пару переездов
(которые, как известно, каждый по два пожара) и, наконец, появилось
немного свободного времени и я решился.

Сразу встал вопрос, какую схему выбрать для повторения, коих в
интернете просто огромнейшее количество. Поэтому я сформулировал
некоторые требования:
1. Выходная мощность не менее 15-20 Вт на канал. Чтобы можно было
работать на имеющиеся у меня колонки СОЮЗ 130АС-002 и обеспечивать
при этом достаточную громкость и приемлемое качество. Это
требование автоматически тащит за собой необходимость мощного
двухтактного выходного каскада и режим АВ. Использование
однотактного режима на таких мощностях потребует применения очень
мощной (и дорогой) лампы и очень мощного и дорогого выходного
трансформатора. КПД такого усилителя будет также оставлять желать
лучшего.
2. Использование доступных радиоламп и деталей. Как известно,
средний срок службы радиоламп составляет около 1000 часов. А
значит, при обычной эксплуатации усилителя их придется периодически
менять, а значит, их надо где-то доставать. Поэтому желательно
собрать усилитель на достаточно ходовых и доступных (как по цене
так и по доставаемости) радиолампах. Также существенная проблема
при сборке ламповой техники силовые и выходные трансформаторы.
Заниматься их намоткой и перемоткой ну вообще никак не хочется.
Необходимо использовать готовые решения.
3. Усилитель хотелось бы собрать полностью на электровакуумных
приборах, без единого полупроводника. То есть даже выпрямитель
анодного напряжения сделать не на полупроводниковых диодах, а на
электровакуумных кенотронах. Данное требование технически не
оправдано, это скорее для спортивного интереса. Хотя, использование
в качестве выпрямителей кенотронов вместо полупроводниковых диодов,
позволяет автоматически решить проблему с задержкой подачи анодного
напряжения питания ламп. Хотя, эта "проблема", на мой взгляд,
высосана из пальца.
4. Усилитель должен быть полностью законченной конструкцией с
минимальным набором присущих усилителю функций: несколько
коммутируемых входов, регуляторы громкости, баланса и тембра,
индикаторы уровня.

Прошерстив немало сайтов на эту тематику, мне приглянулась
схема Сергея Комарова. В
схеме использовались достаточно доступные телевизионные (т.е.
широко использовавшиеся в массовых советских телевизорах) лампы,
унифицированные выходные трансформаторы. Также схема порадовала
достаточно продуманной схемотехникой и отсутствием ярко выраженных
ошибок и косяков, коими, к сожалению, просто пестрят схемы,
выкладываемые в интернетах энтузиастами. Для усилителя заявляется
выходная мощность 43 Вт. Это несколько больше чем мне надо, но
больше это ведь не меньше)

Источник питания
Для питания схемы необходим достаточно мощный источник питания,
ведь КПД ламповых усилителей очень низкий. Кроме того, раз мы
решили использовать выпрямитель на кенотронах, это еще больше
ухудшает КПД. Чтобы не заниматься намоткой, в качестве силового
трансформатора было принято решение использовать широко
распространенный и достаточно доступный трансформатор ТС(А)-270 от
массовых цветных телевизоров серии УЛПЦТ. Этот трансформатор
относительно легко можно достать, например, на авито. Там его можно
купить за 500-1000 р., причем, в сборе с самим телевизором.
Единственное, для такой серьезной покупки необходимо позвать не
слишком хилого товарища, ведь вес этой модели телевизоров 60 70 кг
и в одиночку его перетаскивать не очень комфортно. Несмотря на то,
что этот трансформатор заточен под использование исключительно в
телевизоре, большое количество различных обмоток дают широкие
возможности подобрать необходимое напряжение. Трансформатор собран
из двух одинаковых катушек, имеющих одинаковый набор обмоток.
Соединяя обмотки нужным образом, где последовательно, а где
параллельно можно получить что-то близкое к нужному.

Для вышеприведенной схемы нужно 200 В, 200 мА и 400 В, 25мА (на
каждый канал). Плюс накал, который посчитаем отдельно.
Для двухполупериодного выпрямления на кенотроне необходимы две
одинаковые полуобмотки, общая точка которых заземлена. Обмотки
будут работать по очереди, одна на положительной полуволне, другая
на отрицательной, передавая энергию в нагрузку то через один диод
кенотрона, то через другой. Минус такой схемы нерациональное
использование обмоток, плюс хороший запас по току, т. к. по сути
полуобмотки включены параллельно и их токи суммируются.
Итак, смотрим что у нас есть на трансформаторе (на одной
половине): обмотка 122+2,2 В, 400 мА, две по 71 В, 200 мА, одна 97
В, 70 мА. Итак, если взять обмотку на 122 В и включить
последовательно синфазно с ней две параллельно соединенных обмотки
на 71 В мы получим в итоге 193 В, что после выпрямления даст на
конденсаторе фильтра порядка 230 В. Почему не 270, как по формуле?
Дело в том, что на кенотроне, который имеет большое внутреннее
сопротивление в отличие от полупроводникового диода, падает намного
большее напряжение. И это падение тем больше чем больше ток
нагрузки, нагрузочная характеристика у кенотрона имеет существенный
завал. Соответственно, на ламповый выпрямитель нужно подавать
большее напряжение чем если бы стоял полупроводник. Насколько
больше? Для этого необходимо обратиться к справочнику и найти
нагрузочную кривую на нужный кенотрон. Вот, например, кривая для
кенотрона 5Ц4С.

Этот кенотрон мы поставим в цепи выпрямления 400 В. Забегая
вперед, скажу что ток потребления по этой цепи для всего усилителя
будет примерно 70 мА. Согласно графику, для тока потребления 70 мА
и выходному напряжению 400 В необходимо подавать на вход около 320
В переменного напряжения. Где же взять такое напряжение? 193 В у
нас уже есть, добавим к нему последовательно синфазно оставшуюся
обмотку на 97 В, получим 290 В. Блин, чуть-чуть не хватает до 320.
Можно добавить еще обмотку 16,5 В, как я сделал в одной из
промежуточных версий усилителя, но тогда вырастет и напряжение 230
В, что и так уже немного больше чем надо. Можно было и забить на
это, ламповая техника не очень критична к питающим напряжениям,
плюс-минус 20-30 В для нее погоды не сделают, но на радиорынке мне
очень удачно попался небольшой маломощный трансформатор ТПП 226 с
четырьмя обмотками на 20 В и двумя на 4 В. Включив их
последовательно синфазно, получил почти ровно 400 на нагрузке. Да,
максимальный ток кенотрона 5Ц4С 120 мА, что с запасом хватает для
питания цепи 400 В.
Кстати, важный момент. В описании к кенотрону указан параметр
максимальная емкость фильтра, 5 мкФ. Полез на интернетные форумы
узнать, с какой целью указано это ограничение и чем грозит его
превышение. Ни одного верного ответа на этот вопрос не нашел, кто
только и что только не фантазирует на эту тему. Большая часть
придерживается ошибочного мнения что это для того чтобы не
превысить ток во время заряда емкости при включении питания. Хотя в
реальности фильтрующая емкость заряжается очень плавно по мере
прогрева кенотрона и превысить ток в принципе не возможно. На самом
деле причина, вероятно, немного в другом. Для этого необходимо
вспомнить принцип работы двухполупериодного выпрямителя с емкостным
фильтром. Причем не важно, на кенотроне он или на
полупроводниках.

Во время полуволны емкость заряжается до амплитудного значения,
а затем в промежутке между полуволнами помаленьку разряжается на
нагрузку, во время следующей полуволны снова заряжается. Ток через
выпрямительный прибор течет только тогда когда мгновенное
напряжение переменного тока больше напряжения на нагрузке, т. е. во
время прохода верхушки полуволны. При этом форма тока имеет вид
короткого импульса (заштрихованная фигура на рисунке) и этот
импульс тем короче, чем больше емкость фильтра. Но поскольку
энергии в нагрузку надо передать одно и то же количество, то чем
короче импульс, тем больше его амплитуда. Грубо говоря, если
длительность импульса 1/10 периода, а средний ток нагрузки 100 мА,
то амплитуда токового импульса 1 А! Как я писал выше, у кенотронов
очень большое внутреннее сопротивление и такой большой импульс тока
даст очень большое падение напряжения на нем. На аноде будет
рассеиваться очень большая мощность, большая плотность тока через
катод приведет к его быстрому выходу из строя. Поэтому разработчики
кенотрона рекомендуют ограничить емкость пятью микрофарадами, тогда
импульс тока будет длиннее, энергия размажется по большей площади,
амплитуда тока будет не такой большой, перегрев анода будет в
пределах нормы и лампа прослужит заявленный изготовителем срок.
А что же делать нам? Ведь такие огромные пульсации питающего
напряжения неприемлемы для качественного Hi-End усилителя. Выход
один ставить дроссель. Дроссель съест переменную составляющую и
пропустит на выход только постоянное напряжение. После дросселя
можно ставить любую емкость, хоть 1000 мкФ. Дроссель поставил
максимум какой удалось найти унифицированный, Д20-1,5Гн-0,2А.
Для питания цепи 200 В необходим ток 400 мА. Кенотронов на такой
ток немного. Даже если взять относительно доступный 5Ц3С, у
которого максимальный ток 230 мА, то таких кенотронов все равно
надо включать 2 шт в параллель, или по 1 шт на каждый канал. Кроме
того, на каждый кенотрон надо подавать 3 А на накал, т. е. 6 А на
две штуки. И падение напряжения на 5Ц3С даже больше чем на 5Ц4С.
Кроме того, 5Ц3С с прямым накалом, а это те еще заморочки. Для него
надо мотать отдельную изолированную обмотку для накала. Можно,
конечно, применить 5Ц8С, он дает 420 мА по максимуму, но эту лампу
я достать не смог. Зато относительно без проблем приобрел 2 диода
6Д22С.

Это демпферные диоды, разработанные для строчной развертки
цветных телевизоров. Телевизоры довольно быстро модифицировали
чтобы исключить эти лампы из схемы и они остались не у дел. Их до
сих пор можно найти в новом состоянии и за небольшие деньги. А
параметры у них приличные: средний выпрямленный ток 300 мА, ток в
импульсе 1 А и они замечательно работают как обычный выпрямитель.
При этом жрут на накал всего по 2 А каждый, накал косвенный, с
отдельной обмоткой париться не нужно. К этим диодам я пришел не
сразу, а сначала попробовал на их месте менее мощные и более
доступные 6Д20П. Эти диоды тянут по 220 мА каждый, чего, в
принципе, впритирочку но хватает. Но я все же решил заменить их на
более мощные чтобы был запас по выпрямленному току и по импульсному
току. Тем более что по накалу оба диода жрут примерно одинаково.
Для ограничения импульсного тока в цепь перед конденсатором
поставил резистор 10 Ом, емкость конденсатора при этом не
ограничивал. Осциллограмма тока, снятая с этого резистора показала
амплитуду импульса тока около 1 А, что для этого диода терпимо.
Для работы выходного каскада необходим источник отрицательного
напряжения порядка -30 В. Ток потребления по этой цепи крошечный,
единицы миллиампер, поэтому можно применить маломощные диоды. Я
использовал двойные диоды 6Х2П, которые вообще то предназначены для
детектирования радиосигнала, но и как выпрямители тоже работают
отлично.

Теперь про накал ламп. На накал нужно: 2х1,9А (диоды), 2А
(кенотрон), 4х1,35А выходные лучевые тетроды, 2х0,42А
(триод-пентоды), 3х0,31А (двойные триоды), 2х0,3А (индикаторы),
2х0,3А (маломощные диоды). Итого в сумме имеем более 14 А, что
соответствует мощности порядка 90 Вт. Именно такая мощность (и это
еще безо всего остального) будет уходить только в тепло на подогрев
катодов. Само собой, ни о каком КПД и экономии не может быть и
речи. Но у трансформатора ТСА-270 только 3 накальных обмотки: на
0,9 А, на 2,1 А и на 2,95 А. Этого тотально не хватает. Что же
можно сделать? Можно задействовать две полуобмотки на 16,5 В, 1,85
А. Запитать от них выходные лампы, включив накалы последовательно.
Излишек погасить резистором. Мощные диоды запитать от обмотки 2,95
А. Она будет работать с почти амперным перегрузом, но должна
сдюжить. Маломощные диоды необходимо запитать от отдельной обмотки
на 0,9 А. Связано это с тем что потенциалы катодов и подогревателя
должны соотноситься определенным образом. Как и почему чуть далее.
От этой же обмотки запитаем лампочки индикации включения. На
оставшуюся обмотку 2,1 А навесим всю оставшуюся мелочь кроме
кенотрона. Получается небольшой перегруз, на 0,3 А, но не сильно
критично, должно выдержать. Ну, а для кенотрона так уж и быть
домотаем отдельную обмотку. На 5 В мотать не так много, всего 14
витков. Все витки можно намотать на одной катушке или же (что
правильнее) разместить половину на одной, половину на другой
катушке. Я их намотал обычным гибким монтажным проводом сечением не
менее 0,75 мм2 в теплостойкой изоляции прямо поверх бумаги. Очень
не хотелось разбирать трансформатор, поскольку половины
магнитопровода у него склеены слоем какой то фигни, и после
разборки не всегда удается эту фигню отчистить чтобы соединить
половины плотно, без зазора. Зазор в трансформаторе (в отличие от
дросселя) вещь вредная. Наличие отдельной обмотки также позволит в
случае необходимости и не переделывая схему воткнуть вместо
кенотрона с косвенным накалом 5Ц4С кенотрон с прямым накалом
5Ц3С.
Вроде бы все удалось запитать, хоть и с перегрузом по некоторым
накальным обмоткам. Такой вариант у меня работал некоторое время,
но потом вылезла неприятная особенность. Дело в том, что я применил
трансформатор ТСА с алюминиевыми обмотками, которые распаяны на
лепестки спецприпоем. От времени, а также из-за перегруза и
перегрева у накальных обмоток в месте припайки ухудшился контакт,
который в свою очередь привел к еще большему перегреву и окислению
в этом месте. Чтобы не было таких проблем, рекомендую применять
трансформаторы с медными обмотками (с индексом ТС или СТ в
названии). Такие трансформаторы, как правило, стояли в более старых
моделях телевизоров семейства УЛПЦТ, преимущественно тех, у которых
еще надо крутить пассатижами ручку ПТК для переключения программ. Я
такой трансформатор все же потом добыл и поменял. А временно
проблему с плохим контактом решил заменой лепестков на зажимные
клеммы от электрических колодок, которые продаются в магазинах
электротоваров. Также я разгрузил наиболее перегруженную обмотку на
2,95 А. Для этого пришлось сделать хитрый финт ушами. Как я написал
выше, для питания выходных ламп использовалась обмотка на 16,5 В.
Но для питания двух, последовательно включенных ламп нужно 12,6 В.
Излишек у меня гасился на 10-ваттном резисторе сопротивлением
4,4/1,35=~3,3 Ом. На нем впустую рассеивалось 6 Вт мощности (на
каждом канале). В новой схеме я разделил накальную обмотку 2,95 А
на две полуобмотки (они располагаются на разных катушках), средняя
точка которых заземлена. А каждая полуобмотка напряжением 3,3 В
включалась последовательно противофазно с обмоткой 16,5 В. Таким
образом, из напряжения 16,5 В вычитается 3,3 В и на накал выходных
ламп подается 13,2 В или по 6,6 В на каждую. Что немного больше
нормы, но до максимальных 7 В по паспорту запас есть. В то же время
протекающий ток накала этих ламп суммируется с током накальной
обмотки выпрямительных диодов и суммарный максимальный ток этой
обмотки получается 4,3 А. А выпрямительные диоды потребляют из
этого тока только 3,8 А, что дает нам 0,5 А запаса! Неплохое
решение проблемы. К тому же мы сэкономили целых 12 Вт мощности,
которые раньше просто отапливали помещение, в котором стоит
усилитель.

Монтаж
деталей внутри корпуса
Однако делать такие финты не всегда возможно. Причина в том, что
для ламп нужно учитывать еще максимальное пробивное напряжение
катод-подогреватель. Оно зависит от свойств изоляции подогревателя.
Например для лампы 6Д22С максимальное напряжение между катодом и
подогревателем 100 В если потенциал подогревателя выше и 900 В если
потенциал катода выше. У нас на катоде 250 В, а потенциал
подогревателя около земли, поскольку середина накальной обмотки
заземлена. Укладываемся в пределы. Для ламп 6П44С напряжение между
катодом и подогревателем 220 В, при этом катод сидит на земле, а на
подогревателе переменная составляющая максимум 16,5 В. Тоже
укладываемся. А вот с маломощными диодиками сложнее. У них
положительный потенциал подогревателя вообще не допускается, а
отрицательный может быть не более 350 В. Поэтому придется запитать
накал диодов от отдельной обмотки и соединить цепь накала с
выпрямленным потенциалом минус 185 В. Да, максимальная амплитуда
напряжения на катоде равна удвоенному выпрямленному напряжению, т.
е. 370 В, что даже уже немножко превышает максимальные 350 В по
паспорту. Но почти за год эксплуатации проблем из-за этого не
было.
А для чего нужно такое большое отрицательное напряжение? Ведь
для схемы необходимо всего минус (30...35) В. И отвод на
выпрямитель можно сделать с обмотки 71 В, тогда выпрямленное
напряжение будет около минус 100 В и проблем не будет никаких. Так
и было сделано в промежуточной версии усилителя. Там напряжение
смещения устанавливалось обычным резистивным делителем. Но
выяснилась одна неприятная особенность. При колебаниях напряжения
сети в пределах 210 - 250 В, а также при просадке напряжения на
трансформаторе при работе усилителя под нагрузкой наблюдалось
уменьшение напряжения смещения, что приводило к увеличению тока
покоя. Причем, чем больше нагрузка, тем больше просадка, тем меньше
напряжение смещения, больше ток покоя и, тем самым, еще большая
просадка напряжения. Такая вот положительная обратная связь. Было
решено стабилизировать напряжение смещения газовым стабилитроном.
Из доступных низковольтных удалось разжиться только СГ-202Б. Его
напряжение стабилизации около 84 В, что, в принципе, терпимо. А вот
что не терпимо так это очень большое напряжение зажигания, которое
по справочнику может достигать 135 В! Т.е. более чем на 50% больше
чем напряжение стабилизации. Конечно, в реальности это напряжение
будет ниже, чем в справочнике, но мы то проектируем устройство,
которое должно работать при любых разбросах входящих в его состав
электронных компонентов. А вот, например, у стабилитрона СГ-1П
напряжение стабилизации 150 В, а гарантированно зажигается он при
напряжении не более 175 В, т.е. при напряжении, превышающем не
более чем на 20 % от номинального. Поэтому для гарантированного
зажигания стабилитрона его делитель необходимо запитывать по
возможности от большего напряжения.
Также я решил стабилизировать питание предварительных каскадов
стабилитроном СГ-1П. Особой необходимости в этом нет, просто такой
стабилитрон у меня валялся в коробке.

Стабилитрон СГ1П и дополнительный
маломощный трансформатор
Есть еще один тонкий момент, связанный с накалом, о котором
следует упомянуть. Это влияние т. н. паразитного диода
катод-подогреватель. Подогреватель как и все нагретые тела
испускает электроны и, если на катоде относительно него
положительный потенциал, то вместе с подогревателем они образуют
открытый диод косвенного накала через который переменное напряжение
накала (помеха 50 Гц) может проникать на катод. Этому старается
препятствовать изоляция подогревателя, но по мере износа лампы, ее
изолирующие свойства ухудшаются и ток (утечки) возрастает. Порядок
величины тока утечки не более 15 - 20 мкА. Вроде бы величина тока
не такая большая, но если в цепи катода стоит высокоомный резистор
(катодный повторитель) или лампа усиливает очень слабые сигналы,
влияние тока утечки может оказаться существенным. В нашей схеме
почти у всех ламп в цепи катодов стоят низкоомные резисторы, на
которых ток утечки даст почти не ощутимое падение напряжения. Но
вот у ламп 6Н23П, на которых собран диффкаскад, в цепи катода стоит
источник тока, имеющий очень большое сопротивление. Для этого
каскада ток утечки представляет опасность.
Бороться с этим явлением можно двумя способами: 1. Подать на
подогреватель потенциал заведомо больший чем потенциал катода.
Тогда паразитный диод будет заперт обратным напряжением и помех
вносить не будет. Если напряжение на катоде 3-4 В, то подав на
подогреватель 20-25 В мы гарантированной запрем диод. Потенциал
можно получить с помощью делителя напряжения и подключить к любому
из концов обмотки накала. Но в нашем случае этот вариант не
годится, поскольку катод находится под потенциалом около 100 120 В
и для запирания диода необходимо напряжение 140-150 В. Это
напряжение уже слишком велико для других ламп, питающихся от этой
же накальной обмотки. Можно, конечно, намотать для этих ламп еще
одну дополнительную обмотку 6,3 В, 1А и таким образом немного
разгрузить обмотку на 2,1 А, которая работает с небольшим
перегрузом. И к этой обмотке подвести через высокоомный резистор
потенциал 150 В от стабилитрона. Этот способ я бы рекомендовал тем
кто, возможно, захочет повторить мою схему. Но в моей конструкции
усилителя это бы потребовало слишком больших переделок. Поэтому я
прибег к способу номер 2: симметрировать потенциал подогревателя
относительно общего провода. В этом случае, помехи от левой и
правой половин подогревателя будут одинаковы по величине, но
противоположны по знаку и взаимоуничтожатся. Симметрирование
осуществляется с помощью переменного резистора концы которого
подключены к обмотке накала, а движок соединен с общим проводом.
Вращая движок резистора необходимо найти такое положение ротора при
котором уровень сетевой наводки будет минимален (перед этой
регулировкой необходимо отключить ООС усилителя, т. к. она также
давит помехи). Эту доработку я делал последней, поэтому на схеме
она не отражена.
По питанию все, теперь кратенько пробежимся по схеме
усилителя.

Усилитель
Сигнал от внешнего источника через разъемы Х2 Х4 поступает на
коммутатор на галетном переключателе, которым можно выбрать один из
трех входов. После коммутатора сигнал приходит на пассивный
регулятор тембра (низких и высоких частот). Многие, вероятно, будут
говорить что эта штука не нужна. Но на мой взгляд - требуется.
Поскольку разные источники имеют разные частотные характеристики и
для оперативной регулировки темброблок необходим. Схема темброблока
стандартная, но, в отличие от бытовой аппаратуры, диапазон
регулирования сделан меньше. Это позволяет использовать вместо
переменных резисторов с характеристикой В более доступные резисторы
с характеристикой А. Методика расчета таких регуляторов
неоднократно описана, можно посмотреть, например, здесь.
Для корректной работы регуляторов тембра источник сигнала для
темброблока должен иметь как можно меньшее сопротивление, а
нагрузка наоборот как можно большее. Поэтому, а также для
компенсации потерь сигнала в пассивном регуляторе, после
темброблока сигнал поступает на каскад усиления на двойном триоде
6Н23П. Каскад работает с автосмещением и небольшой местной ООС по
току. С выхода каскада сигнал поступает на регуляторы громкости и
баланса. Регуляторы зашунтированы конденсаторами небольшой емкости
для предотвращения спада АЧХ из-за входной емкости следующего
каскада. После регуляторов сигнал поступает на триодный каскад
усиления на триодной половине лампы 6Ф1П. Каскад работает с
автосмещением и на катодный резистор заходит сигнал общей ООС. ООС
сделана отключаемой. При переводе тумблера в верхнее положение,
катодный резистор шунтируется и каскад работает как обычный с
автосмещением. Также каскад охвачен местной частотозависимой ООС по
напряжению. Это необходимо для ограничения полосы пропускания
усилителя по высоким частотам для предотвращения самовозбуждения.
Каскад непосредственно нагружен на дифференциальный каскад на
двойном триоде 6Н23П. Диффкаскад питается от источника тока,
собранного на пентодной части лампы 6Ф1П. Уровень этого тока
задается резистором в цепи катода лампы. С диффкаскада
противофазные сигналы поступают соответственно каждый на свой
мощный выходной каскад на лучевом тетроде 6П44С. Каскады работают с
принудительным смещением. Уровень напряжения смещения задает ток
покоя каскада, который должен быть примерно 100 мА. Катодные
резисторы дают небольшую ООС по току и позволяют измерить ток покоя
в каждом плече не разбирая усилитель (падение напряжения на
резисторе около 500 мВ). Это требуется для диагностики ламп и
выявления тех, в которых эмиссия катода упала уже ниже допустимого.
Небольшая балансировка каскадов обеспечивается резистором в цепях
вторых сеток. Зачем это надо, я хз, эта часть схемы один-в-один
скопирована у автора. Вращение ручки этого резистора абсолютно
никак не сказывается на работе схемы. При наличии на трансформаторе
симметричных обмоток, этот вывод можно было бы подключить к отводу
трансформатора для реализации ультралинейного включения, что могло
бы несколько улучшить линейность усилителя. Для этого можно было бы
использовать два трансформатора ТН с перекрестным включением
обмоток, такие схемы также можно найти по ссылке в начале статьи.
Выходные каскады нагружены на две полуобмотки трансформатора ТН.
Несмотря на то, что обмотки явно несимметрично намотаны,
возникающие при этом повышенные межвитковые емкости не оказывают
существенного влияния, поскольку лучевые тетроды 6П44С токовые
лампы и паразитные емкости не оказывают какого либо существенного
влияния. С выходных обмоток снимается сигнал на акустическую
систему. Обмотки соединены таким образом чтобы на нагрузке 4 Ом
обеспечить наименьшие потери в проводе. Для этого на отвод 4 Ом
работают последовательно включенные обмотки на 5,4 А и две
параллельно включенные на 3,4 А. На 8 Ом работают предыдущие плюс
еще одна обмотка на 3,4 А. Примерная выходная мощность при 4 Ом
нагрузке: (6,3+6,3)^2 / 4 = 40 Вт, при 8 Ом нагрузке:
(6,3+6,3+6,3)^2 / 8 = 45 Вт. С отвода на 4 Ом снимается сигнал на
индикатор уровня и ООС.
Немного про ООС. Вообще говоря, качество звучания двухтактных
ламповых усилителей, работающих в классе АВ, крайне паршивое. Когда
я его включил первый раз после обычного транзисторного, даже мои
далеко не музыкальные уши чуть в трубочку не свернулись. И это
действительно так и есть и подтверждается измерительными приборами.
Большие линейные искажения, большие нелинейные искажения, узкая
полоса частот, которая ограничена снизу десятками герц из-за
недостаточной индуктивности выходных трансформаторов, наводки 50 Гц
от силового трансформатора. Также свою лепту вносит большой разброс
параметров отдельных экземпляров ламп, который довольно большой
даже у новых, не говоря уже о б/у. Повышая ток покоя, нелинейные
искажения можно немного снизить, но это даст повышенную нагрузку на
источник питания. В общем, так себе вариант. С этим нужно что то
делать и я решил охватить весь усилитель (кроме самого первого
каскада) отрицательной обратной связью (ООС). Тем более что у
усилителя было некоторое избыточное усиление и я решил его
потратить с пользой.
В чем физический смысл ООС? На вход усилителя в противофазе
подается часть усиленного выходного сигнала. Из-за этого уровень
сигнала на выходе уменьшается. Какой же прикол уменьшать выходной
сигнал, спросите вы? А прикол в том, что вместе с выходным сигналом
на вход в противофазе поступают помехи и искажения, которые
родились уже внутри, охваченной ООС части схемы. А поскольку они
поступают в противофазе, на выходе усилителя они вычитаются! Итак,
достоинства ООС:
1. Уменьшение нелинейных искажений
2. Уменьшение линейных искажений, расширение полосы частот
3. Уменьшение шума, фона и помех, проникающих по питанию
Недостатки ООС:
1. Необходимость ограничения полосы усиления усилителя для
предотвращения превращения отрицательной ОС в положительную и
самовозбуждения
2. Это скорее не недостаток, а просто особенность ламповых схем:
в них невозможно реализовать сколько-нибудь глубокую ООС из-за
огромной нелинейности выходного трансформатора и низкого усиления
ламповых каскадов. Поэтому кардинально улучшить качество ламповых
усилителей по аналогии с транзисторными не получится.

Индикатор уровня. Кроме эстетической функции индикатор несет и
чисто утилитарную показывает уровень выходного сигнала. Например,
только благодаря ему я заметил что усилитель самовозбуждается на
частоте 1 МГц при включении ООС когда я недостаточно ограничил
полосу усилителя. Я наивно полагал, что выходной трансформатор
сработает фильтром и ограничит полосу, но межобмоточная емкость ее
не то что не ограничила, но и превратила ООС в ПОС. После этого я
добавил местную частотозависимую ООС в первый каскад усиления и все
стало норм. Сигнал звуковой частоты поступает на переменный
резистор, которым можно подстроить уровень индикации. У меня он
настроен так чтобы полностью закрывалось все поле индикатора уже
при выходной мощности 10 Вт. С переменного резистора сигнал
поступает на катод диода, который совместно с RC-цепочкой работает
здесь детектором огибающей сигнала. Продетектированный сигнал
поступает на лампу индикатора. Индикатор включен по типовой схеме и
в пояснениях не нуждается. Единственное, я столкнулся с тем что луч
некоторых индикаторов отклонен у кого влево, у кого вправо. Это не
неисправность. Связано это с тем что металлический экран с
люминофором бывает намагничен что и вызывает отклонение луча.
Проведя рядом с ним слабеньким магнитиком, зеленый луч можно
выправить и поставить ровно.
Про смещение. Для задания режима работы выходных ламп, лучевых
тетродов необходимо достаточно большое отрицательное напряжение
"смещения". В данной схеме применен вариант с фиксированным или
принудительным смещением. Недостатками этого решения является
необходимость в дополнительном выпрямителе - источнике этого
отрицательного напряжения. Кроме этого, его необходимо
стабилизировать и регулировать по мере износа ламп. Причем,
регулировать желательно для каждой лампы отдельно, поскольку у них
может быть существенный разброс параметров от экземпляра к
экземпляру. В этом свете, использование автосмещения может быть
предпочтительным. Автор исходной схемы предлагает попробовать такой
вариант самостоятельно. В этом случае в катодную цепь каждой лампы
включается резистор сопротивлением 150, шунтированный конденсатором
не менее 1000 мкФ на 50 В. В такой схеме ток покоя лампы
поддерживается неизменным вне зависимости от анодного напряжения и
старения лампы. Недостатком является большая мощность, рассеиваемая
на этом резисторе - около 6 Вт на каждом, или 24 Вт на весь
усилитель, что многовато. Чтобы объединить достоинства обоих
вариантов можно применить схему комбинированного смещения. В
катодной цепи оставить резистор автосмещения, но намного меньшего
номинала, например 30 Ом, а на сетки также подавать фиксированное
смещение, но можно нестабилизированное и общее для всех ламп. Иными
словами, некоторый уровень смещения (например, 80%) общий для всех
ламп, а автосмещение обеспечивает оставшиеся 20% напряжения
смещения, которое и дает стабилизацию тока покоя. Но это опять же в
моей конструкции не использовано в связи с необходимостью
существенных переделок. Это рекомендуется для тех, кто захочет
повторить данную схему.
Схема с учетом исправления всех ошибок и учетом всех
рекомендаций приведена ниже.

В ней для упрощения исключен дополнительный трансформатор, а для
повышения напряжения в цепочку дополнительно включены обмотки 17 В.
Тока в них хватает. Исключен источник отрицательного напряжения
смещения со стабилитроном и регулировками, использована схема с
автосмещением по причинам, описанным выше. В качестве выходных
трансформаторов применены ТС-180. Выходные лампы в ультралинейном
включении. С точкой подключения вторых сеток, и, соответственно,
величиной этой "ультралинейности" можно поиграться. Исключен
стабилитрон 150 В. В остальном, схема повторяет описанную выше.
Несмотря на упрощение схемы, ее характеристики не хуже, описанной
выше.
Конструкция и детали.
Корпус, как я уже писал выше, использовал готовый от компьютера
мультикассы. На нем сверху вполне свободно разместились силовой
трансформатор, выходные трансформаторы, дроссели питания, лампы.
Единственный минус корпуса он дюралюминиевый и не экранирует от
магнитных полей силового трансформатора, а это сделать крайне
необходимо. Сзади корпуса были отверстия под стандартные разъемы
материнской платы АТХ, их пришлось закрыть алюминиевой пластиной.
Входные разъемы для аудиосигнала я использовал типа CANON, просто
потому что у меня такие разъемы были. Вообще, тип разъема не имеет
значения, можно использовать и RCA и советские DIN-5. Выходные
клеммы винтовые типа ЗМП или аналоги. Их преимущество надежный
зажимной контакт, удобство монтажа на задней панели и доступная
цена. Также на заднюю панель выведены тестовые гнездышки
малогабаритные типа Г1,6 под штеккер Ш1,6. С их помощью можно
контролировать питающие напряжения и режимы выходных ламп без
разборки корпуса усилителя. Это тоже периодически нужно делать
поскольку лампы со временем садятся. На задней панели смонтирован
выключатель ООС на тот случай если захочется послушать настоящий
теплый ламповый звук со всеми искажениями и наводками.
Силовой трансформатор типа ТС(А)-270. Предпочтение следует
отдавать трансформаторам с медными обмотками (без буквы А), но и
алюминиевые будут работать ничем не хуже. Трансформатор крайне
необходимо устанавливать в железном кожухе. К сожалению, понял я
это слишком поздно, когда уже разместил все элементы на корпусе.
Магнитное поле рассеяния трансформатора довольно велико, поскольку
он работает почти с полной загрузкой. Это поле мало того что
наводится на проходящие рядом в корпусе соединительные провода, оно
также наводится на стоящие рядом выходные трансформаторы и в
динамиках слышен слабый гул 50 Гц, даже когда усилитель только
включен и лампы еще не прогрелись. Кожух обязательно требуется
снабдить вентиляционными отверстиями. Трансформатор можно
использовать с готовой панелькой для предохранителей, в нее же
вместо контактных штырьков после небольшой доработки легко встает
разъем под стандартный компьютерный кабель питания.
Ламповые панельки для мощных ламп керамические от массовых
черно-белых телевизоров. В свое время у меня этих панелек было
завались, теперь же их пришлось покупать. Барыги на радиорынке за
них сейчас хотят много денег, поэтому их тоже имеет смысл купить в
сборе с ламповым Ч/Б ТВ на авито. Из того же ТВ можно взять и
силовой трансформатор ТС-180, который можно употребить в качестве
выходного. Панельки для маломощных ламп девятиконтактные,
керамические с ушками для монтажа. Стоят недорого.
Выходные трансформаторы ТН-56 кроме того что трудно достать, так
еще и просят за них около 1000 - 1500 р. Их можно без проблем
заменить на следующие по списку в семействе, например, ТН-60,
ТН-61. Главное, проверить по справочнику чтобы выходные обмотки
были примерно на одинаковый ток нагрузки. Вместо этих
трансформаторов неплохо подходят силовые ТС-180. Большой набор
обмоток позволяет включать их с разным коэффициентом трансформации
и использовать режим ультралинейного включения, причем место
подключения второй сетки можно также выбирать, пробуя разные
варианты. Что также хорошо, эти трансформаторы (в отличие от ТН)
полностью симметричны. Единственное, при использовании этих
трансформаторов мне потребовалось включить блокировочные
конденсаторы порядка 1000-2200 пФ между анодами выходных ламп и
корпусом для блокировки самовозбуждения на высоких частотах. На
полосе частот усилителя эти конденсаторы никак не сказываются.

Дроссели по питанию выходного каскада должны быть на ток не
менее 0,4А, и иметь индуктивность как можно большую. Мне удалось
достать пару на 1,5 Гн. Это маловато, но сойдет. Дроссель по
питанию 400 В, должен быть на ток не менее 0,1 А. Если приобрести
пару телевизоров УЛПЦТ, из них можно добыть не только
трансформаторы, но и примерно подходящие дроссели Др 5- 0,08 (5 Гн,
0,08 А) и Др 0,4 0,34 (0,4 Гн, 0,34 А).
На передней панели установлен галетный переключатель селектор
входов, можно взять любой на 2 направления и на 3 положения. Рядом
с переключателем стоят переменные резисторы. Я сначала использовал
сдвоенные советские типа СП-3, но, к сожалению, у них от старости
совсем стал плох резистивный слой. Сколько я в них не пшикал
смазками и жидкостями для улучшения контакта, они при повороте
издавали шорох, а один из них в какой то точке вообще уходил в
обрыв. Пришлось их заменить на новые китайские. Единственная
трудность состоит в том, чтобы найти резисторы с характеристикой В.
Если в регуляторы НЧ, ВЧ, баланса еще можно поставить резисторы с
характеристикой А (поскольку глубина регулировки тембра невелика),
то на регулятор громкости необходимо постараться и найти все же с
характеристикой В. Поскольку человеческое ухо имеет логарифмическую
характеристику чувствительности, то и громкость необходимо изменять
с логарифмической зависимостью.

На передней панели смонтированы две неоновые лампочки индикации
появления анодного напряжения +400 В и +200 В. Они зажигаются когда
кенотроны прогреются и выпрямленное напряжение вырастет до
напряжения зажигания этих ламп. Тип ламп не важен, можно взять
лампочки из блока выбора программ телевизоров УЛПЦТ. Рядом с
лампочками смонтирован выключатель питания.
Внутри усилителя монтаж выполнен навесным способом на лепестках
ламповых панелек и на планках с контактами. Планки карболитовые от
какого то старого прибора, но подойдут и любые другие. Главное,
проверить их на наличие загрязнений и следов пробоя. На одной из
планок у меня обнаружилась утечка между соседними лепестками, из-за
которой уходил режим лампы. Пришлось дефектный лепесток просто
пропустить. Необходимо быть внимательным к таким вещам, ламповая
техника с ее килоомными и мегаомными сопротивлениями очень
чувствительна к утечкам, качеству изоляции и монтажа.

Конденсаторы используются пленочные типа К73-17 также из старых
телеков, резисторы МЛТ оттуда же. Конденсаторы нужно подбирать по
максимальному рабочему напряжению с запасом, ламповая техника вся
высоковольтная. Резисторы выбираются не столько по мощности,
сколько по удобству монтажа. Более крупные резисторы имеют более
длинные и толстые выводы, прочнее держатся в лепестках.
Дополнительный трансформатор, дроссель по напряжению 400 В
смонтированы внутри корпуса. Просто потому что их я добавлял позже
и места на поверхности уже не было. Газовый стабилитрон СГ-1П
сначала тоже стоял наверху, но после добавления еще одного каскада
усиления, он переехал в поддон.
Индикаторные лампы включения с зеленым светофильтром, от какого
то прибора. Включены последовательно, светятся вполнакала, создавая
небольшой подсвет внутри корпуса.
Фильтрующие электролитические конденсаторы 220 мкФ с малой
высотой по вертикали, смонтированы на пластиковой изоляционной
пластине и ей же придавливаются к верхней панели. Соединены
монтажным проводом. Более мелкие электролитические конденсаторы
фиксируются полукруглыми планками (такие планки используются для
прижима кабелей).
Подстроечные резисторы смонтированы на верхней поверхности и
торчат штоками наружу. Это необходимо для оперативной регулировки
при необходимости. На штоках сделаны шлицевые пропилы под плоскую
отвертку.
Монтаж выполнен проводами от компьютерных блоков питания.
Особого скрытого смысла в этом нет, просто у меня полно таких
проводов. Цепи накала крайне необходимо вести витой парой проводов,
контакт с корпусом в каком либо месте не допускается. Все общие
провода по возможности сходятся в одном месте на конденсаторах
фильтра питания выходных каскадов. Также следует следить за тем
чтобы не образовывалось замкнутых петель земляных проводов, иначе
поле рассеяния силового трансформатора наведет на них довольно
существенную ЭДС помехи 50 Гц.

Для защиты от поражения электрическим током заказал для
усилителя кожух из прозрачного оргстекла. Такие услуги предлагают
многие фирмы. В одной конторе с меня запросили около 3 т. р., в
другой удалось изготовить за 1500. Кожух крепится на петлях и может
открываться вверх для замены ламп и регулировок. Вверху кожуха
сделано множество мелких отверстий для вентиляции. Снизу передней
части кожуха сделана одна широкая щель для захода охлаждающего
воздуха. Шильдики для органов управления и ламп сначала хотел
сделать также из тонкого оргстекла, заполнив след от лазера
краской, но затея не удалась. Результат получился фиговый. Пришлось
воспользоваться специальным пластиком для подобного рода табличек.
Смотрится, конечно, не так как я хотел с оргстеклом, но, в целом,
неплохо.
Измерение параметров

Самое главное проверить приборами, что же мы, в итоге,
напаяли.
Измерение выходной мощности.
Это один из основных параметров усилителя. Для этого нам
потребуется генератор сигналов низкочастотный, осциллограф,
милливольтметр и нагрузка 4 Ом на каждый канал. У меня есть в
наличии генератор Г3-118, двухлучевой осциллограф С1-18,
милливольтметры В3-38. Если измерительных приборов нет, вместо
генератора можно подавать сигнал с линейного выхода звуковой карты,
при этом необходимо скачать программу генератор звуковых сигналов,
их много бесплатных. Контролировать сигнал также можно подавая его
на линейный вход звуковой карты, единственное делать это надо через
резистивный делитель чтобы не спалить вход - раз и чтобы не
превысить максимальный уровень звуковухи - два. И да, тоже
необходимо будет скачать и установить программу осциллограф. Такие
программы уже сложнее и чаще платные. Измерять уровень можно и
обычным мультиметром. Тут, однако, надо иметь ввиду что обычные
ширпотребовские мультиметры заточены под измерение переменного тока
низкой частоты, 50 200 Гц, не более, поскольку там стоят дешевые
выпрямительные диоды. На частоте 1 кГц и выше, такие мультиметры
могут давать уже достаточно существенную погрешность. Нагрузка 4 Ом
самодельная, сделанная из большого количества 2-ваттных резисторов,
обдуваемых вентилятором. Вентилятор питается от выпрямленного
напряжения с этой же нагрузки. По быстрому нагрузку можно сделать
из 4-х последовательно включенных 10-ваттных керамических
резисторов по 1 Ом, которые придется купить.

Подключим генератор на вход усилителя, сразу на оба канала.
Громкость установим на максимум, регуляторы тембра в среднее
положение. Установим частоту стандартную для подобного рода
измерений 1 кГц. К выходу каждого канала подключим нагрузку 4 Ом,
параллельно ей по каналу осциллографа и по милливольтметру. Будем
увеличивать уровень входного сигнала с генератора наблюдая при этом
за пропорциональным увеличением выходного сигнала. Когда на экране
осциллографа у синусоид будут видны различаемые на глаз искажения
(это соответствует КНИ 5 - 10%), увеличивать уровень прекратим и
будем считать эту мощность максимальной для данного усилителя.
Уровень выходного напряжения смотрим по вольтметру и
рассчитываем выходную мощность по формуле P=U^2/R=81/4=~20 Вт. Эх,
всего то 20 Вт, а ведь было обещано 43! Посмотрев сигнал на анодах
и катодах выходных ламп, видно, что это они входят в ограничение,
им не хватает как диапазона напряжения питания 200 В, так и тока
катода. Напряжение питания можно повысить если применить
трансформатор с большим коэффициентом трансформации, например
ТС-180 со всеми включенными обмотками. При этом необходимо будет
пропорционально уменьшить ток покоя, иначе будет превышена
максимальная допустимая мощность на аноде лампы. Однако это
потребует существенной переделки питания усилителя. Также не очень
эффективно используется габаритная мощность выходного
трансформатора, его выходные обмотки недогружены. В общем, обдумав
все и прикинув варианты, я пришел к выводу что из существующей
схемы без существенных переделок большего уже не выжать. Поэтому
будем считать что такая мощность нас устраивает. Кстати, при
включенной ООС выходная мощность усилителя чуть больше, поскольку
ООС немного корректирует вносимые искажения.
Измерение АЧХ.
Для измерения АЧХ усилителя нужно установить регуляторы тембра в
среднее положение, установить определенное напряжение на выходе
усилителя, например 3 В. И уменьшать частоту генератора в сторону
низких частот до тех пор пока напряжение на выходе усилителя не
упадет менее 0,707*3=2,121 В. Это будет нижняя граничная частота
усилителя. Аналогично потом нужно увеличивать частоту генератора до
тех пор пока напряжение на выходе усилителя снова не упадет менее
2,121 В. Это будет верхняя граничная частота усилителя. Это нужно
проделать сначала для одного канала усилителя, затем для другого.
Но для получения наглядной картинки мы воспользуемся прибором
СК4-56. Это анализатор спектра, но он имеет внутри генератор
качающейся частоты и его легко можно приспособить для измерения
АЧХ. Для этого на вход усилителя подаем сигнал не с генератора
сигналов, а с выхода генератора качающейся частоты анализатора
спектра. АЧХ измеряем сначала в одном канале, потом в другом,
подключая вход анализатора сначала к одному каналу, потом к
другому. Анализатор спектра также следует подключать через делитель
напряжения для защиты его входа (имеет тенденцию дохнуть), а также
чтобы его входной усилитель не ушел в зашкал. На анализаторе ставим
ручную развертку, настраиваем частоты границ экрана (от -5 кГц до
45 кГц). Затем устанавливам уровень сигнала таким чтобы точка была
в середине сетки прибора. Ставим самую медленную развертку и
запускаем измерение. На экране прибор нарисует нам АЧХ канала
усилителя. По уровню минус 3 дБ полоса частот усилителя 10 Гц 30
кГц. Проделываем такую же операцию при минимальном и максимальном
положении регулятора тембра ВЧ. Потом так же и с другим
каналом.
АЧХ в области ВЧ (в клетке 5 кГц по горизонтали, 10 дБ по
вертикали, 0 Гц - где всплеск):
. Завал характеристики в среднем положении связан с некоторым поворотом самой трубки прибора.")
АЧХ в области ВЧ (в клетке 5 кГц по
горизонтали, 10 дБ по вертикали, 0 Гц - где всплеск). Завал
характеристики в среднем положении связан с некоторым поворотом
самой трубки прибора.
")
АЧХ в области НЧ (в клетке 10 Гц по
горизонтали, 10 дБ по вертикали, 0 Гц - где провал)
Измерение КНИ.
Измерим КНИ с помощью того же прибора СК4-56. Только подавать
сигнал будем с генератора низкой частоты. Для получения как можно
более точных результатов необходимо использовать генератор с как
можно меньшей величиной собственных искажений. Убедиться в этом
можно, подав сигнал напрямую на анализатор спектра. На экране
должна торчать только одна палка, соответствующая частоте настройки
генератора (1 кГц). Также нормируем уровень сигнала чтобы основная
гармоника (1 кГц) находилась на уровне 0 дБ сетки, соответственно,
побочные гармоники будут иметь уровень минус 20 дБ, минус 40 дБ и
т.д.
Спектр сигнала при небольшой выходной мощности (~ 1 Вт):

Спектр сигнала при почти максимальной выходной мощности (~ 20
Вт):

Считать вручную КНИ очень долго, поэтому воспользуюсь маткадом.
Вообще говоря, есть КНИ (коэффициент нелинейных искажений) и КГИ
(коэффициент гармонических искажений) немного разные вещи и
считаются по разным формулам. Но при малых значениях, КНИ и КГИ в
первом приближении совпадают, поэтому будем считать КНИ. Считать
будем приближенно, по первым 10 гармоникам. Записываем уровни
первых 10 гармоник, переводим из децибел в абсолютные значения,
считаем по формуле, получаем уровень КНИ на частоте 1 кГц и почти
номинальной мощности 3,7 %.

Повторяем процедуру на небольшой мощности и получаем значение
0,2 %. В принципе, для лампового усилителя очень и очень неплохо.
Однако необходимо учесть что это значения при включенной ООС, при
выключенной параметры будут существенно хуже.
Вот и все что мне хотелось рассказать про свой проект постройки
лампового усилителя. Свои замечания и предложения прошу писать в
комментариях.
























































 Теперь с помощью алгоритмов распознавания
лиц и Python вы сможете с лёгкостью отслеживать всех людей, которые
приближаются к вашей двери.
Теперь с помощью алгоритмов распознавания
лиц и Python вы сможете с лёгкостью отслеживать всех людей, которые
приближаются к вашей двери.
.") Компьютер Nvidia Jetson Nano 2GB имеет
много общего с Raspberry Pi оба представляют собой одноплатные
компьютеры на ОС Linux. Отличие состоит в том, что с целью
ускорения работы моделей глубокого обучения модуль Nvidia Jetson
оснащён 128-ядерным графическим процессором Nvidia и поддерживает
программно-аппаратную архитектуру параллельных вычислений (CUDA).
Компьютер Nvidia Jetson Nano 2GB имеет
много общего с Raspberry Pi оба представляют собой одноплатные
компьютеры на ОС Linux. Отличие состоит в том, что с целью
ускорения работы моделей глубокого обучения модуль Nvidia Jetson
оснащён 128-ядерным графическим процессором Nvidia и поддерживает
программно-аппаратную архитектуру параллельных вычислений (CUDA).






































 Лампы
сделанные по этому проекту
Лампы
сделанные по этому проекту
 Дом-КУБОИД - 1х1,618 - 14400х9000х4200 -
1этаж
Дом-КУБОИД - 1х1,618 - 14400х9000х4200 -
1этаж Дом-КУБОИД - 1х1,618 - 14400х9000х4200 -
1этаж
Дом-КУБОИД - 1х1,618 - 14400х9000х4200 -
1этаж Дом-КУБОИД - 1х1,618 - 14400х9000х4200 - 1этаж
Дом-КУБОИД - 1х1,618 - 14400х9000х4200 - 1этаж
 Дом-КУБОИД - 1х1,618 - 14400х9000х4200 -
1этаж
Дом-КУБОИД - 1х1,618 - 14400х9000х4200 -
1этаж Дом-КУБОИД - 1х1,618 - 14400х9000х4200 -
1этаж
Дом-КУБОИД - 1х1,618 - 14400х9000х4200 -
1этаж Дом-КУБОИД - 1х1,618 - 14400х9000х4200 -
1этаж
Дом-КУБОИД - 1х1,618 - 14400х9000х4200 -
1этаж Дом-КУБОИД - 1х1,618 - 14400х9000х4200 -
1этаж
Дом-КУБОИД - 1х1,618 - 14400х9000х4200 -
1этаж Дом-КУБОИД - 1х1,618 - 14400х9000х4200 - 1этаж
Дом-КУБОИД - 1х1,618 - 14400х9000х4200 - 1этаж



























 Фактическое положение дел
Фактическое положение дел Фактическое положение дел
Фактическое положение дел Фактическое положение дел
Фактическое положение дел Концепция генплана
Концепция генплана Концепция генплана
Концепция генплана
 Концепция генплана
Концепция генплана Концепция генплана
Концепция генплана Концепция генплана
Концепция генплана
 Референс
Референс Референс
Референс Референс
Референс
 Референс
Референс Референс
Референс Рефренс
Рефренс Референс
Референс Рефренс
Рефренс Рефренс
Рефренс Рефренс
Рефренс
















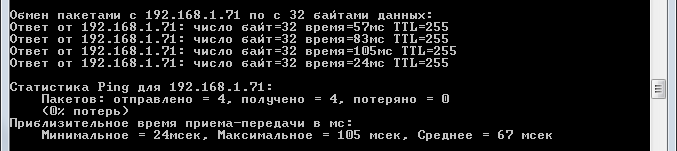
 Дашборд Traefik запускается на кластере Pi.
Дашборд Traefik запускается на кластере Pi.
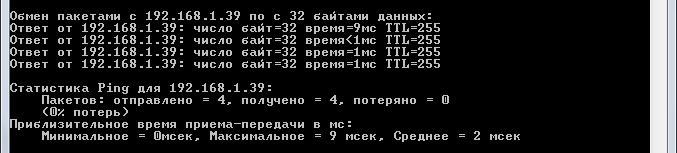
 Adguard Home запускается на кластере Pi.
Adguard Home запускается на кластере Pi.
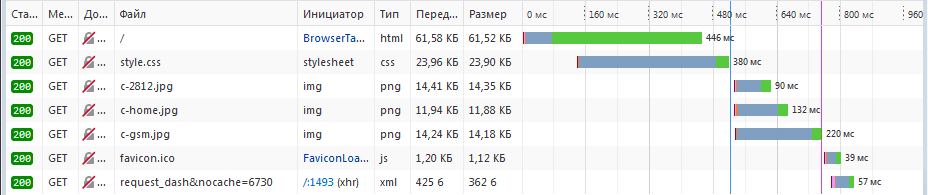
 На кластере Pi запускается дашборд Grafana.
На кластере Pi запускается дашборд Grafana.
 Дашборд Kubernetes запускается на кластере Pi.
Дашборд Kubernetes запускается на кластере Pi.


 Сухие проплешины.
Сухие проплешины.
 Сегментация изображений.
Сегментация изображений.
 Программа Label IMG.
Программа Label IMG.
 Набор
данных 1. Результаты.
Набор
данных 1. Результаты.
 Пример
аугментации изображений.
Пример
аугментации изображений.
 Пример дополненных и реальных данных.
Пример дополненных и реальных данных.
 Набор данных
4. Результаты.
Набор данных
4. Результаты.
 Набор
данных 5. Результаты.
Набор
данных 5. Результаты.
 Схема системы.
Схема системы.
 Результат работы скрипта управления двигателем.
Результат работы скрипта управления двигателем.
 Согласно скрипту угол до проплешины составляет
42.
Согласно скрипту угол до проплешины составляет
42.

 Пиксели/футы.
Пиксели/футы.


 Пустышки на столе
Пустышки на столе
 Плата смонтирована
Плата смонтирована
 Тестовое включение
Тестовое включение
") Перемычки из витой пары между фрагментами (ступенями)
Перемычки из витой пары между фрагментами (ступенями)
 Логическая организация ступеней
Логическая организация ступеней
 Не обращайте внимание на внешний вид
ступени - это временный вариант
Не обращайте внимание на внешний вид
ступени - это временный вариант



































































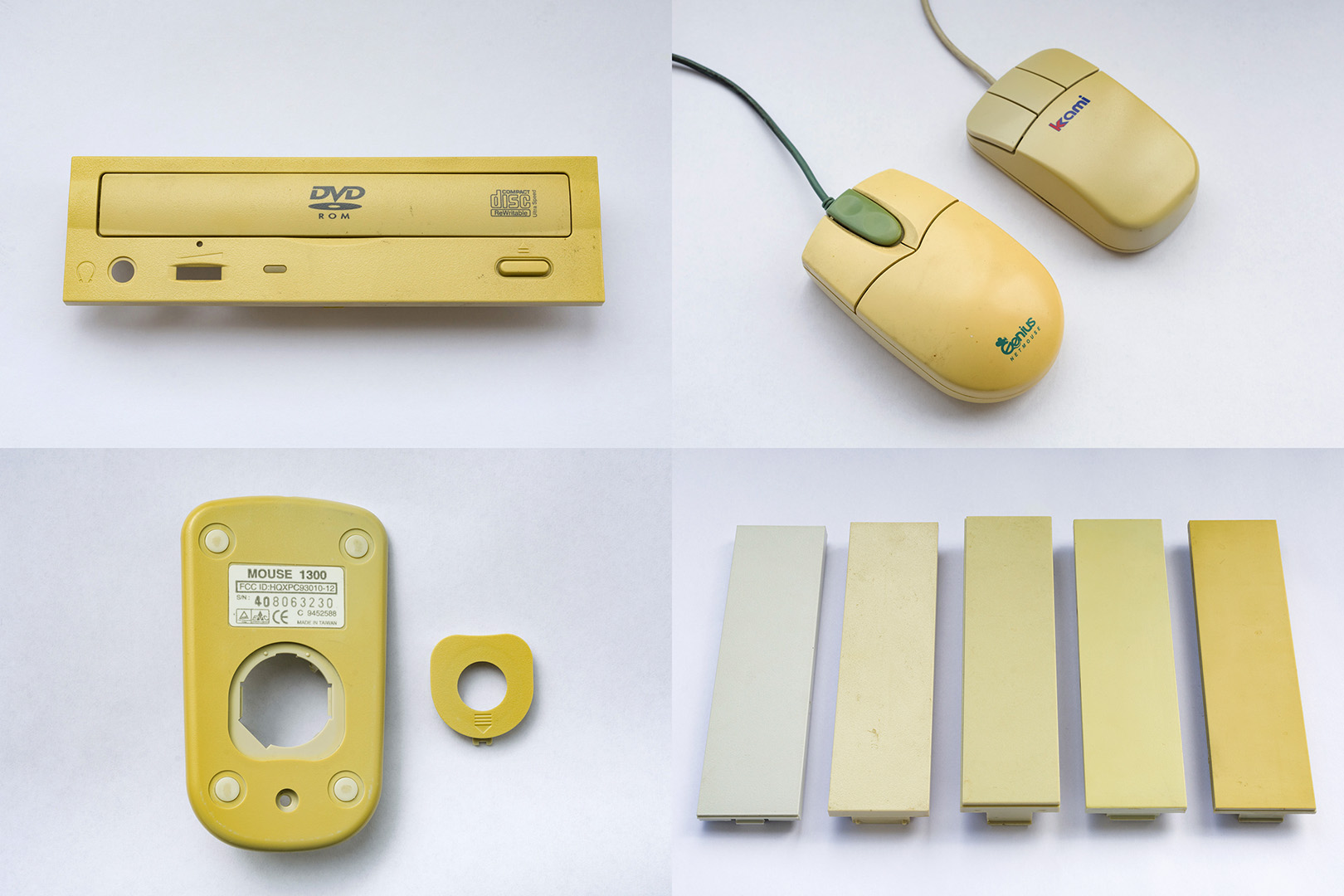
 Рис. 1. Привод выпущен в 2003 году.
Видимо, долго стоял на солнце
Рис. 1. Привод выпущен в 2003 году.
Видимо, долго стоял на солнце
 Рис. 2. Пакеты не дают перекиси испаряться
Рис. 2. Пакеты не дают перекиси испаряться
 Рис. 3. Уже через пару часов заметна разница
Рис. 3. Уже через пару часов заметна разница
 Рис. 4. Если температура воздуха выше 20
C, подогрев необязателен
Рис. 4. Если температура воздуха выше 20
C, подогрев необязателен
 Рис. 5. Разницы между деталями из разных
пакетов не заметно
Рис. 5. Разницы между деталями из разных
пакетов не заметно
 Рис.
6. Практически цветовой веер
Рис.
6. Практически цветовой веер
. Источник: http://www.goodfellow.com/larger-quantities/polymers/tpx-characteristics/") Рис. 7. Quartz кварцевое стекло, TPX
полиметилпентен, Glass оконное стекло, PS полистирол, PVC
поливинилхлорид, PMMA полиметилметакрилат (оргстекло). Источник:
http://www.goodfellow.com/larger-quantities/polymers/tpx-characteristics/
Рис. 7. Quartz кварцевое стекло, TPX
полиметилпентен, Glass оконное стекло, PS полистирол, PVC
поливинилхлорид, PMMA полиметилметакрилат (оргстекло). Источник:
http://www.goodfellow.com/larger-quantities/polymers/tpx-characteristics/
 Рис. 8. Привод CD-ROM с аппаратными
кнопками. Когда-то я делал на основе такого проигрыватель
Рис. 8. Привод CD-ROM с аппаратными
кнопками. Когда-то я делал на основе такого проигрыватель Рис. 9. Похоже, мышка Kami изначально
была скорее серой, чем белой
Рис. 9. Похоже, мышка Kami изначально
была скорее серой, чем белой
 Рис. 10. Если бы я мог, я бы вернулся в
этот момент и всё сделал по-другому
Рис. 10. Если бы я мог, я бы вернулся в
этот момент и всё сделал по-другому
 Рис. 11. Варись, вуншпунш!
Рис. 11. Варись, вуншпунш!
 Рис. 12. Видна довольно чёткая граница
Рис. 12. Видна довольно чёткая граница
 Рис. 13. Заметка на будущее: перед
отбеливанием отклеивать всё, что можно отклеить
Рис. 13. Заметка на будущее: перед
отбеливанием отклеивать всё, что можно отклеить
 Рис.
14. А вот и первая жертва
Рис.
14. А вот и первая жертва

 Рис. 16. У этого контейнера двойное дно,
так что мышка не перегреется
Рис. 16. У этого контейнера двойное дно,
так что мышка не перегреется
 Рис. 17. Радует, что яркость надписи
совсем не изменилась
Рис. 17. Радует, что яркость надписи
совсем не изменилась
 Рис. 18. В этой статье есть таблица с
описанием совместимости разных материалов с
перекисью:habr.com/ru/post/501310/
Рис. 18. В этой статье есть таблица с
описанием совместимости разных материалов с
перекисью:habr.com/ru/post/501310/
 Рис. 19. Также можно приклеить ко дну
контейнера пластиковые проушины и привязывать детали к ним
Рис. 19. Также можно приклеить ко дну
контейнера пластиковые проушины и привязывать детали к ним
 Рис. 20. Не скажу, что желтизна ушла на
100%, но на 90 пожалуй
Рис. 20. Не скажу, что желтизна ушла на
100%, но на 90 пожалуй
 Рис. 21. Ничто не вечно под луной...
Рис. 21. Ничто не вечно под луной...
 Рис. 22. Полагаться на одно только
солнце в наших краях было бы недальновидно!
Рис. 22. Полагаться на одно только
солнце в наших краях было бы недальновидно!