Про метеостанцию на Хабре писали не раз и не два, и наверное не
с десяток раз. И вот настало моё время. Решил с вами поделиться
своей.
Постановка задачи
Зачем вообще нужна метеостанция? Сегодня в мире хватает погодных
сервисов, в том числе с локальными сводками погоды. Однако помимо
контроля внешних параметров мне нужно было получить данные и с
датчиков температуры и влажности внутри помещения. Помимо просто
информационной составляющей, зная температуру в доме и снаружи,
можно, например, управлять котлом или вентиляцией, и поддерживать
комфортный микроклимат (погодозависимая автоматика). Кроме того,
мне очень хотелось бы отслеживать тенденции и тренды погоды на
длительных промежутках времени, например в год-два. То есть, данные
нужно где-то хранить.
Из всего того делаем выводы:
-
Нужно хранилище данных (сервер)
-
Датчики будем использовать разные и в разных местах, поэтому
проще сделать систему модульной (IoT)
-
Помимо локального сервера данные, хотя бы текущих показаний
хорошо бы скидывать в облако
-
Так как мы будем собирать достаточно много данных, можно данными
поделиться
Архитектура

Самым простым и популярным решением для метеостанции является
Arduino, однако подружить с его домашней сетью - это дополнительные
девайсы\шилды, лишние деньги и сложность, а значит - время. Поэтому
из коробки проще использовать модуль уже со встроенным Wi-Fi,
например ESP8266 (NodeMCU) с подключенными сенсорами. Это
достаточно удобно, что один и тот же модуль можно использовать и
дома, и за окном. При желании даже можно его использовать в
качестве сервера.
Но почему бы не проставить в центр системы лучше что-то
помощнее? Благо у меня пылится без дела Raspberry Pi первой ревизии
(но и любая другая подойдёт). Внутренние датчики можно подключить,
в принципе через GPIO и к малинке напрямую, но у меня роутер с
малинкой в одной комнате установлен, а мониторить нужно другую.
Если у вас такой проблемы нет - то можно от одной NodeMCU
избавиться. Малинка будет получать данные от датчиков, сохранять их
в базе данных и при необходимости отображать. Так же к GPIO
Raspberry Pi можно подцепить LoRa - приёмник и получать данные от
удалённых за пределами Wi-Fi сети датчиков (и вот они Arduino). Ну,
и наконец, малинка будет отправлять данные в облако.

Итого, нам понадобится:
-
Raspberry PI
-
ESP8266 (2шт. + 1шт. опционально)
-
BME280 (2 шт.)
-
Часы реального времени DS1302 (опционально)
-
OLED-дисплей 128х64 на SH1106 (опционально)
-
Датчик дождя на компараторе LM373 (опционально)
-
УФ-датчик GY-VEML6070 (опционально)
-
Raspberry Pi Camera (опционально)
-
Arduino Nano (2 шт., опционально)
-
SX1278 (3 шт., опционально)
-
Магнитный компас с чипом QMC5883L/HMC5883L (опционально)
-
Датчик освещённости (светодиодный) с компаратором LM737
(опционально)
-
Датчики напряжения до 25V (опционально)
-
Датчики тока ACS712 (опционально)
Подключение SX1278 к Raspberry Pi
Для начала подключим к малинке радиомодуль.
|
Raspberry Pi
|
SX1278
|
|
3.3V
|
3.3V
|
|
GROUND
|
GROUND
|
|
GPIO10
|
MOSI
|
|
GPIO9
|
MISO
|
|
GPIO11
|
SCK
|
|
GPIO8
|
NSS/ENABLE
|
|
GPIO4
|
DIO0
|
|
GPIO22
|
RST
|
Соединяем пины Raspberry Pi и SX1278 как на картинке:

Замечание: для разных ревизий Raspberry Pi используются разное
количество пинов, а значит и распиновки, смотрите документацию.
По поводу использования LoRa-модулей хочу обратить внимание на
несколько моментов:
-
Перед подачей питания на модуль LoRa обязательно убедитесь, что
к нему подключена антенна, иначе есть риск, что модуль сгорит!
-
На качество сигнала помимо антенны влияют правильные настройки,
весьма важно, чтобы частоты приёмника и передатчика совпадали, а
диапазон был свободен от шума (например игрушечных радиоуправляемых
машинок)
Установка сервера
На Raspberry Pi загружаем Raspberry Pi OS Lite.

Далее устанавливаем статический адрес для нашей малинки:
sudo nano /etc/dhcpcd.conf
Добавляем\правим строки на наш желаемый IP и IP наш роутер
interfaceeth0# или wlan0 если малинка подключена по Wi-Fistaticip_address=192.168.0.4/24staticrouters=192.168.0.1staticdomain_name_servers=192.168.0.1. 8.8.8.8
Теперь включаем удалённый доступ через SSH, SPI (нужен для
подключения LoRa), а так же Camera, если планируем её
использовать.
sudo raspi-config


Включаем:
-
SSH (если собираемся подключаться по SSH, а не только через
клавиатуру)
-
SPI (если собираемся использовать LoRa)
-
Camera (если собираемся использовать камеру)
Убеждаемся, что стоит автологин при загрузке:
Boot Options -> Console Autologin
Выходим из raspi-config, перезагружаем:
sudo shutdown -r now
Теперь у нас есть удалённый доступ к малинке, можем подключиться
через ssh или можем продолжить через клавиатуру.
Вся логика сервера написана на Python3, поэтому ставим его:
sudo apt-get install python3.7
Теперь осталось загрузить собственно мой проект H.O.M.E.:
cd ~git clone https://github.com/wwakabobik/home.git
В качестве веб-сервера я выбрал flask, на Хабре есть отличная
серия статей, поэтому я
не буду останавливаться на подробностях при работе с ним.
Копируем контент из папки с сервером:
mkdir web-servercp -r home/home_server/* /home/pi/web-server/
Устанавливаем все зависимости:
cd web-serversudo python3.7 -m pip install-rrequirements.txt
Создаём базу данных из шаблона:
cat db/schema.sql | sqlite3 flask_db
Собственно всё, теперь можем запустить сервер:
cd /home/pi/web-server && sudo python3.7 app.py
Но мы же хотим, чтобы сервер запускался при загрузке Raspberry
Pi?
Тогда в конце /etc/rc.local, перед exit 0,
добавляем вызов bash-скрипта:
/home/pi/flask_startup.sh &
Копируем этот скрипт на место:
cd ~cp ~/home/bash/flask_startup.sh .
Я так же считаю, что было бы неплохо иметь скрипт, который
проверяет, жив ли ещё сервер, и если он мёртв, то перезапускает
его. Копируем и его.
cp ~/home/bash/check_health.sh .
Добавляем в планировщик cron:
sudo crontab -e
задание:
1-59/5 * * * * /home/pi/check_health.sh
Немного о софте сервера
За запуск сервера отвечает app.py.
#!/usr/bin/env python3.7from multiprocessing.pool import ThreadPoolfrom flask import Flaskfrom db.db import init_appfrom lora_receiver import run_loraapp = Flask(__name__, template_folder='templates') # firstly, start Flask# import all routesimport routes.apiimport routes.pagesimport routes.single_pageif __name__ == '__main__': # Start LoRa receiver as subprocess pool = ThreadPool(processes=1) pool.apply_async(run_lora) # Start Flask server init_app(app) app.run(debug=True, host='0.0.0.0', port='80') # Teardown pool.terminate() pool.join()
Обратите внимание, что помимо запуска сервера, в отдельном
процессе запускаем LoRa ресивер, который будет получать данные от
датчиков и пересылать их на сервер.

В остальном архитектура типична для flaska: все возможные routes
вынесены в отдельные файлы, все страницы хранятся в pages, а
шаблоны в templates. Логика базы данных лежит в db, статичные файлы
(картинки) в static, ну а в camera будем складывать картинки с
камеры.

В итоге, текущие показания можно увидеть на dashboard
страницах,

а графики и данные - на отдельных (графики рисует
plotly).
Софт LoRa-ресивера
home_server/lora_receiver.py
from time import sleepimport requestsfrom SX127x.LoRa import *from SX127x.board_config import BOARDendpoint = "http://0.0.0.0:80/api/v1"class LoRaRcvCont(LoRa): def __init__(self, verbose=False): super(LoRaRcvCont, self).__init__(verbose) self.set_mode(MODE.SLEEP) self.set_dio_mapping([0] * 6) def start(self): self.reset_ptr_rx() self.set_mode(MODE.RXCONT) while True: sleep(.5) rssi_value = self.get_rssi_value() status = self.get_modem_status() sys.stdout.flush() def on_rx_done(self): self.clear_irq_flags(RxDone=1) payload = self.read_payload(nocheck=True) formatted_payload = bytes(payload).decode("utf-8", 'ignore') status = self.send_to_home(formatted_payload) if status: sleep(1) # we got the data, force sleep for a while to skip repeats self.set_mode(MODE.SLEEP) self.reset_ptr_rx() self.set_mode(MODE.RXCONT) def send_to_home(self, payload): if str(payload[:2]) == '0,': requests.post(url=f'{endpoint}/add_wind_data', json={'data': payload}) elif str(payload[:2]) == '1,': requests.post(url=f'{endpoint}/add_power_data', json={'data': payload}) else: print("Garbage collected, ignoring") # debug status = 1 return statusdef run_lora(): BOARD.setup() lora = LoRaRcvCont(verbose=False) lora.set_mode(MODE.STDBY) # Medium Range Defaults after init are 434.0MHz, Bw = 125 kHz, Cr = 4/5, Sf = 128chips/symbol, CRC on 13 dBm lora.set_pa_config(pa_select=1) assert (lora.get_agc_auto_on() == 1) try: lora.start() finally: lora.set_mode(MODE.SLEEP) BOARD.teardown()
В этом коде главное - это получение пакета в событии on_rx_done
- если пакет получен, нужно его декодировать.
Проверяем в send_to_home что payload[:2] равен ожидаемому коду
датчика (я для простоты использую значения 0, и 1,), то отсылаем на
сервер и спим секунду, чтобы пропустить повторные пакеты.Если нет,
продолжаем получать пакеты.
API
Ключевое, что делает 99% времени сервер - это простой. Но в
остальные 1% он отдаёт и получает данные, и за это, помимо
отображения страниц через веб-интерфейс отвечает API.
Именно через Flask REST API мы будем посылать или получать
данные от сенсоров.
home_server/routes/api.py
@app.route('/api/v1/send_data')def send_weather_data(): return send_data()@app.route('/api/v1/add_weather_data', methods=['POST'])def store_weather_data(): if not request.json: abort(400) timestamp = str(datetime.now()) unix_timestamp = int(time()) data = request.json.get('data', "") db_data = f'"{timestamp}", {unix_timestamp}, {data}' store_weather_data(db_data) return jsonify({'data': db_data}), 201
Данные пишутся в лог:

В моём случае, если мы получили данные от датчика (получили POST
запрос с верным JSON), то мы их сохраняем в БД. Так же, если мы
получили GET запрос на отправку данных (send_data), то данные
отправляем данные на облако.
home_server/pages/weather_station/send_data.py
def send_data(): data = get_last_measurement_pack('0', '1') image = take_photo() wu_data = prepare_wu_format(data=data) response = str(send_data_to_wu(wu_data)) response += str(send_data_to_pwsw(wu_data)) response += str(send_data_to_ow(data)) response += str(send_data_to_nardmon(data)) send_image_to_wu(image) copyfile(image, f'{getcwd()}/camera/image.jpg') return response

Ах да, забыл упомянуть камеру. Если мы подключили камеру к
Raspberry Pi, то можем отправлять или сохранять изображения погоды
за окном. Для этого есть отдельный метод:
home_server/pages/shared/tools.py
from picamera import PiCamera<...>camera = PiCamera()<...>def take_photo(): camera.resolution = (1280, 720) # lower resolution to fit in limits camera.start_preview() sleep(5) image = f'{getcwd()}/camera/image_{int(time())}.jpg' camera.capture(image) camera.stop_preview() return image
Внешние датчики
полные скетчи можно найти в home/iot

Самым удобным и простым модулем для любительской метеостанции
является модуль BME280, объединяющий в себе термометр, датчик
влажности и давления. Подключаем его по I2C к ESP8266:

Прошивать будем через Arduino IDE (как добавить ESP8266
написано, например, в этой
статье).
iot/esp8266/weatherstation_in/weatherstation_in.ino
#include <ESP8266WiFi.h>#include <ESP8266HTTPClient.h>#include <Wire.h>#include <SPI.h>#include <Adafruit_BME280.h>#include <Arduino_JSON.h>Adafruit_BME280 bme; // use I2C interfaceAdafruit_Sensor *bme_temp = bme.getTemperatureSensor();Adafruit_Sensor *bme_pressure = bme.getPressureSensor();Adafruit_Sensor *bme_humidity = bme.getHumiditySensor();// Датчик не сказать, чтобы очень точный, поэтому добавляем корректирующие значенияfloat correction_temperature = -0.5;float correction_pressure = 15;float correction_humidity = 10;// подключаем Wifivoid connect_to_WiFi(){ WiFi.mode(WIFI_STA); WiFi.begin(wifi_ssid, wifi_password); while (WiFi.status() != WL_CONNECTED) { delay(500); } Serial.println("WiFi connected"); Serial.print("IP address: "); Serial.println(WiFi.localIP()); #endif}/* <> */// собираем данные с датчиковfloat get_temperature(){ sensors_event_t temp_event, pressure_event, humidity_event; bme_temp->getEvent(&temp_event); return temp_event.temperature + correction_temperature;}/* <> */// также точку росы можно вычислить до отправки на сервер, делаем это:float get_dew_point(){ float dew_point; float temp = get_temperature(); float humi = get_humidity(); dew_point = (temp - (14.55 + 0.114 * temp) * (1 - (0.01 * humi)) - pow(((2.5 + 0.007 * temp) * (1 - (0.01 * humi))),3) - (15.9 + 0.117 * temp) * pow((1 - (0.01 * humi)), 14)); return dew_point;}/* <> */// Форматируем в строкуString get_csv_data(){ String ret_string = DEVICE_ID; ret_string += delimiter + String(get_temperature()); ret_string += delimiter + String(get_humidity()); ret_string += delimiter + String(get_pressure()); ret_string += delimiter + String(get_dew_point()); return ret_string;}// Отправляем через HTTP, упаковав строку в JSON:void post_data(){ check_connection(); HTTPClient http; //Declare object of class HTTPClient String content = get_csv_data(); int http_code = 404; int retries = 0; while (http_code != 201) { http.begin(api_url); // connect to request destination http.addHeader("Content-Type", "application/json"); // set content-type header http_code = http.POST("{\"data\": \"" + content +"\"}"); // send the request http.end(); // close connection retries++; if (retries > max_retries) { Serial.println("Package lost!"); break; } }}// cобственно, повторяем это время от времени:void loop(){ post_data(); delay(cooldown);}
По умолчанию у меня стоит интервал в 5 минут, и я считаю, что
DEVICE_ID = "0" внутренний датчик, а DEVICE_ID = "1" внешний.

Датчик дождя LM393+YL83
К внешнему датчику можно подключить так же датчики ультрафиолета
(
GY-VEML6070) и датчик дождя (на компараторе LM393). YL-83
достаточно игрушечный вариант для реального измерения уровня
осадков, по крайней мере без калибровки, но, на какое-то время
сгодиться, потому что мне актуальность по уровню осадкам не сильно
интересует. Ну, точнее интересует на уровне "на улице дождь" или
"сухо". Так же, альтернативно, можно использовать аналоговый датчик
ультрафиолета GY-8511, но тогда придётся выбирать между ним и
датчиком дождя, так как аналоговый вход на NodeMCU только один.
Датчик ультрафиолета можно использовать, например, для оценки
эффективности солнечных панелей. Ну и просто показывает дни, когда
лучше воспользоваться солнцезащитным кремом во время покоса
газона.
Схема подключения к ESP8266 ниже:

Для этих датчиков соответственно добавим три функции:
iot/esp8266/weatherstation_out/weatherstation_out.ino
#include "Adafruit_VEML6070.h"Adafruit_VEML6070 uv = Adafruit_VEML6070();#define VEML6070_ADDR_L (0x38) ///< Low addressRAIN_SENSOR_PIN = A0;/* <...> */#ifdef UV_ANALOG_SENSORvoid get_uv_level(){ int uv_level = averageAnalogRead(UV_PIN); float uv_intensity = mapfloat(uv_level, 0.99, 2.8, 0.0, 15.0); return uv_intensity;}#endif#ifdef UV_I2C_SENSORvoid get_uv_level(){return uv.readUV();}#endif#ifdef RAIN_SENSORvoid get_rain_level(){ int rain_level = averageAnalogRead(RAIN_SENSOR_PIN); return rain_level;}#endif
NodeMCU удобно использовать, когда есть устойчивый Wi-Fi в зоне
их действия. Конечно, ставить внешние датчики для погодной станции
на крыльце - плохая идея, но оборудованная точка, отнесённая
пару-тройку метров от дома - то, что нужно, а сигнала роутера в
доме хватает за глаза.
Правила установки погодной станции
-
Датчики температуры и влажности воздуха обязательно
устанавливаются над естественной поверхностью земли (трава, грунт).
Асфальта, бетона, щебня, камня, металла не должно быть.
-
Датчики температуры и влажности устанавливаются на высоте 2 м
над землёй в метеорологической будке: это небольшой деревянный или
пластиковый ящик (размером приблизительно 40х40х40 см) с белыми,
отражающими свет перфорированными или жалюзийными стенками, а также
солнцеводозащитным козырьком (крышка будки должна быть герметичной
и иметь наклон для стекания осадков с будки).
-
Датчик ветра - на высоте 10-12 м над землёй (именно над землёй,
а не на крышах зданий; в исключительном случае разрешается
размещение дачтика ветра на крыше одноэтажного дома, так чтобы
датчик возвышался над верхним краем крыши не менее чем на 2-3 м, а
над поверхностью земли на 10-12 м).
-
В худшем случае (при этом велик риск погрешностей, особенно в
ночное время) датчик Т и влажности может быть установлен с теневой
стороны здания, на высоте 2 м над землёй, на штанге длиной от стены
как минимум метра 3 , над газоном (не над асфальтом!). Ни в коем
случае не рекомендуется устанавливать их поблизости от сильно
нагревающихся поверхностей, например крыш, стен и т.п.
-
Датчик атмосферного давления устанавливается в помещении вдали
от окон и отопительных приборов. Атмосферное давление зависит от
высоты над уровнем моря места, где производится измерение; поэтому
требуется калибровка датчика давления перед его использованием. Для
правильной установки прибора необходимо воспользоваться показаниями
другого барометра или данными ближайшей метеостанции (с учётом
разности высот, определённой по подробной топографической карте; 10
м подъёма соответствует уменьшению давления примерно на 1 мм рт.ст.
или 1.3 гПа (мБ)).
Как опция, можем добавить ещё одно устройство на ESP8266,
которое будет отображать данные с метеостанции. В моём случае -
удобно не просто подключить дисплей к внутреннему датчику, а иметь
независимое устройство, которое можно расположить где угодно. Для
того, чтобы оно что-нибудь ещё делало - добавим к нему часы
реального времени.

Затем загрузим на него скетч, который будет отображать текущее
время (ЧЧ:ММ) и в бегущей строке данные с метеостанции:
iot/informer/esp8266/informer/informer.ino
#include <ESP8266WiFi.h>#include <ESP8266HTTPClient.h>#include <Wire.h>#include <U8g2lib.h>#include <virtuabotixRTC.h> // https://ampermarket.kz/files/rtc_virtualbotix.zip// RTCvirtuabotixRTC myRTC(14, 12, 13);// OLEDU8G2_SH1106_128X64_NONAME_F_HW_I2C u8g2(U8G2_R0);u8g2_uint_t offset; // current offset for the scrolling textu8g2_uint_t width; // pixel width of the scrolling text (must be lesser than 128 unless U8G2_16BIT is definedconst int string_length = 80; // maximum count of symbols in marqueechar text[string_length]; // text buffer to scroll// Wi-Ficonst char* wifi_ssid = "YOUR_SSID";const char* wifi_password = "YOUR_PASSWORD";// APIconst String ip_address = "YOUR_IP_OF_SERVER";const String port = "YOUR_PORT";const String api_endpoint = "/api/v1/add_weather_data";const String api_url = "http://" + ip_address + ":" + port + api_endpoint;const int max_retries = 5; // number of retries to send packet// Timers and delaysconst long data_retrieve_delay = 300000;const int cycle_delay = 5;unsigned long last_measurement = 0;void setup(void) { Serial.begin(9600); init_OLED(); init_RTC();}/* Init functions */void init_OLED(){ u8g2.begin(); u8g2.setFont(u8g2_font_inb30_mr); // set the target font to calculate the pixel width u8g2.setFontMode(0); // enable transparent mode, which is faster}void init_RTC(){ // seconds, minutes, hours, day of the week, day of the month, month, year // раскомментируйте при прошивке, заполнив текущую дату и время, затем снова закомментируйте и прошейте ещё раз //myRTC.setDS1302Time(30, 03, 22, 5, 19, 2, 2021); // set RTC time myRTC.updateTime(); // update of variables for time or accessing the individual elements.}""" <...> """ String get_data(){ check_connection(); #ifdef DEBUG Serial.println("Obtaining data from server"); #endif HTTPClient http; //Declare object of class HTTPClient int http_code = 404; int retries = 0; String payload = "Data retrieve error"; while (http_code != 200) { http.begin(api_url); // connect to request destination http_code = http.GET(); // send the request String answer = http.getString(); // get response payload http.end(); // close connection retries++; if (retries > max_retries) { break; #ifdef DEBUG Serial.println("Couldn't get the data!"); #endif } if (http_code == 200) { payload = answer; } } return payload;}void loop(void) { // Check that new data is needed to be retrieved from server if (((millis() - last_measurement) > data_retrieve_delay) or last_measurement == 0) { String stext = get_data(); stext.toCharArray(text, string_length); last_measurement = millis(); width = u8g2.getUTF8Width(text); // calculate the pixel width of the text offset = 0; } // Update RTC myRTC.updateTime(); // Now update OLED u8g2_uint_t x; u8g2.firstPage(); do { // draw the scrolling text at current offset x = offset; u8g2.setFont(u8g2_font_inb16_mr); // set the target font do { // repeated drawing of the scrolling text... u8g2.drawUTF8(x, 58, text); // draw the scrolling text x += width; // add the pixel width of the scrolling text } while (x < u8g2.getDisplayWidth()); // draw again until the complete display is filled u8g2.setFont(u8g2_font_inb30_mr); // choose big font for clock u8g2.setCursor(0, 30); // set position of clock char buf[8]; // init bufer to formatted string sprintf_P(buf, PSTR("%02d:%02d"), myRTC.hours, myRTC.minutes); // format clock with leading zeros u8g2.print(buf); // display clock } while (u8g2.nextPage()); offset-=2; // scroll by two pixels if ((u8g2_uint_t)offset < ((u8g2_uint_t) - width)) { offset = 0; // start over again } delay(cycle_delay); // do some small delay}
В итоге результат работы выглядит так:

Соответственно в Raspberry Pi:
home_server/routes/api.py
@app.route('/api/v1/get_weather_data', methods=['GET'])def store_wind_data(): return send_data_to_informer()
pages/weather_station/send.data
def send_data_to_informer(): data_in = get_last_measurement_pack('weather_data', '0', '0') data_out = get_last_measurement_pack('weather_data', '0', '1') pressure = int((data_in['pressure']+data_out['pressure'])/2) formatted_string = f"IN: T={data_in['temperature']}*C, " \ f"H={data_in['humidity']}% | " \ f"OUT: T={data_out['temperature']}*C, " \ f"H={data_out['humidity']}%, " \ f"DP={data_out['dew_point']}*C | " \ f"P={pressure} mmhg" return formatted_string
Радиодатчики
Там, где не дотянуться Wi-Fi, нужно использовать альтернативные
варианты передачи данных. В моём случае - это использование
LoRa-модулей (в связке, например, с Arduino Nano.

Таких устройств у меня два - это датчик скорости и направления
ветра (компас). Пока не буду останавливаться на этом в текущей
статье, если будет интерес - напишу отдельно. Второе устройство -
это вольтметр и два амперметра, для контроля работы ветряка,
зарядки АКБ и потребления.

|
SX1278
|
Arduino Nano
|
|
3.3V
|
3.3V
|
|
GROUND
|
GROUND
|
|
MOSI
|
D10
|
|
MISO
|
D2
|
|
SCK
|
D13
|
|
NSS/ENABLE
|
D12
|
|
DIO0
|
D11
|
|
RST
|
D9
|
И, код, соответственно:
iot/arduino/*_meter/*_meter.ino
// Required includes#include <SPI.h>#include <LoRa.h>// LoRA configconst int LORA_SEND_RETRIES = 5; // сколько раз посылать сообщениеconst int LORA_SEND_DELAY = 20; // задержка между пакетамиconst int LORA_POWER = 20; // мощность передатчика на максимум const int LORA_RETRIES = 12; // сколько раз пытаться инициализировать модульconst int LORA_DELAY = 500; // задержка между попыткой инициализации// Инициализируем модульvoid init_LoRa() { bool success = false; for (int i=0; i < LORA_RETRIES; i++) { if (LoRa.begin(433E6)) // используем 433Мгц { success = true; break; } delay(LORA_DELAY); } if (!success) { #ifdef DEBUG Serial.println("LoRa init failed."); #endif stop(4); } LoRa.setTxPower(LORA_POWER); // aplify TX power #ifdef DEBUG Serial.println("LoRa started!"); #endif }#endif// Посылаем пакет с данными строкойvoid LoRa_send(power_data data){ String packet = DEVICE_ID + "," + String(data.avg_voltage,2) + ","; packet += String(data.avg_current,2) + "," + String(data.avg_power,2) + "," +String(data.avg_consumption,2); for (int i=0; i < LORA_SEND_RETRIES; i++) { LoRa.beginPacket(); // just open packet LoRa.print(packet); // send whole data LoRa.endPacket(); // end packet delay(LORA_SEND_DELAY); } }
Достаточно просто, не правда ли?
Облачные сервисы
Изначально у меня не было цели делиться данными со сторонними
сервисами, но во время отладки появилась мысль о том, что неплохо
было бы иметь референсные данные с местных метеостанций, для
контроля корректности работы своей. Первым, и с самой большой
коллекцией примеров и API оказалась WeatherUnderground.

from wunderground_pws import WUndergroundAPI, unitsfrom secure_data import wu_api_key, wu_reference_station_id""" ... """wu_current = wu.current()""" ... """wu_humidity=wu_current['observations'][0]['humidity'],wu_pressure=int(int(wu_current['observations'][0]['metric_si']['pressure'])/1.33),wu_dew_point=wu_current['observations'][0]['metric_si']['dewpt'],wu_wind_speed=wu_current['observations'][0]['metric_si']['windSpeed'],wu_wind_gust=wu_current['observations'][0]['metric_si']['windGust'],wu_wind_direction=wu_current['observations'][0]['winddir'],wu_wind_heading=deg_to_heading(int(wu_current['observations'][0]['winddir']))
Однако, если была возможность быстро получать данные, то почему
бы ими не поделиться, подумал я? Данные в WU передаются через
GET-запрос, поэтому для удобства предварительно подготавливаем
данные
def prepare_wu_format(data, timestamp=None): payload = f"&dateutc={timestamp}" if timestamp else "&dateutc=now" payload += "&action=updateraw" payload += "&humidity=" + "{0:.2f}".format(data['humidity']) payload += "&tempf=" + str(celsius_to_fahrenheit(data['temperature'])) payload += "&baromin=" + str(mmhg_to_baromin(data['pressure'])) payload += "&dewptf=" + str(celsius_to_fahrenheit(data['dew_point'])) payload += "&heatindex=" + str(celsius_to_fahrenheit(heat_index(temp=data['temperature'], hum=data['humidity']))) payload += "&humidex=" + str(celsius_to_fahrenheit(humidex(t=data['temperature'], d=data['dew_point']))) payload += "&precip=" + str(data['precip']) payload += "&uv" + str(data['uv']) return payload
затем отправляем:
import requests""" ... """def send_data_to_wu(data): wu_url = "https://weatherstation.wunderground.com/weatherstation/updateweatherstation.php?" wu_creds = "ID=" + wu_station_id + "&PASSWORD=" + wu_station_pwd response = requests.get(f'{wu_url}{wu_creds}{data}') return response.content
В результате мы должны увидеть данные на своей метеостанции.

Тут нужно сделать ремарку, что все сервисы, включая WU требуют
регистрации и часто получения API ключей. Вся конфиденциальная
информация хранится в secure_data.py
# Geo Datalatitude =longitude =altitude =cur_location =# WEATHER UNDERGROUND DATAwu_api_key =wu_station_id =wu_station_pwd =wu_reference_station_id =# OPEN WEATHER DATAow_api_key =ow_station_id =# PWSWEATHER DATApwsw_station_id =pwsw_api_key =# NARODMON DATAnarodmon_name = narodmon_owner = narodmon_mac = narodmon_api_key =
Заполняем значения и продолжаем :)
WeatherUnderground увы, работает на платной основе и полученный
мной ключ действует всего лишь год. Поэтому, поискав альтернативы,
я наткнулся на PWS Weather.

Несмотря на то, что на сайте нет описания публичного API для
сторонних устройств (не промышленных метеостанций), разработчики
охотно по запросу присылают примеры, впрочем, за одну ночь и без их
помощи решил задачу по отправке данных, благо формат данных сайт
использует такой же, как и WU.
def send_data_to_pwsw(data): pwsw_url = "http://www.pwsweather.com/pwsupdate/pwsupdate.php?" pwsw_creds = "ID=" + pwsw_station_id + "&PASSWORD=" + pwsw_api_key response = requests.get(f'{pwsw_url}{pwsw_creds}{data}') return response.content
Этот сервис мне показался более дружелюбным, в нём есть
переключатель с имперской на метрическую систему. Плюс красивые
графики, прогнозы.


Ещё можно послать данные на OpenWeatherMap. Персональной
страницы тут нет, а в ответ на исторические данные мы получим
"средние" по больнице данные, но, почему бы и нет? Энтузиастам надо
помогать. Для передачи показаний у OWM для PWS (personal weather
station) своё API, но что-то я не нашёл
готовой обёртки для него на python, поэтому написал свою.

В отличие американских WeatherUnderground и PWS Weather,
использующих имперскую систему, разраработчики OpenWeatherMap из
Латвии и используют метрическую систему (Си), поэтому для передачи
показаний для них не используем конвертеры, а пишем данные сразу из
базы данных, которые мы собрали с датчиков.
from openweather_pws import Stationdef send_data_to_ow(data): pws = Station(api_key=ow_api_key, station_id=ow_station_id) response = pws.measurements.set(temperature=data['temperature'], humidity=data['humidity'], dew_point=data['dew_point'], pressure=data['pressure'], heat_index=fahrenheit_to_celsius(heat_index(temp=data['temperature'], hum=data['humidity'])), humidex=humidex(t=data['temperature'], d=data['dew_point'])) return response
И, наконец, как вариант импортозамещения самый
функциональный, позволяющий хранить в том числе данные с закрытых
датчиков (например те же данные о температуре внутри дома) -
Narodmon.

На сервисе достаточно богатое API, позволяющее не только
передавать показания с датчиков, но и собирать информацию по
геолокации, управлять самим устройством удалённо, так и социальные
фишки вроде "поставить лайк" или отправить сообщение. Особо
здорово, что сервис шлёт email'ы в случае проблем (например датчик
не вышел на связь час), так и настраиваемые "проблемы" вроде
превышения лимита на конкретном датчике. Но, как и в случае OWM я
не нашёл полного API-wrapper для python, и опять написал свой. Теперь, чтобы
отправить данные с датчиков, зовём:
def send_data_to_nardmon(data): nm = Narodmon(mac=narodmon_mac, name=narodmon_name, owner=narodmon_owner, lat=latitude, lon=longitude, alt=altitude) temperature = nm.via_json.prepare_sensor_data(id_in="TEMPC", value=data['temperature']) pressure = nm.via_json.prepare_sensor_data(id_in="MMHG", value=(data['pressure'])) humidity = nm.via_json.prepare_sensor_data(id_in="HUM", value=data['humidity']) dew_point = nm.via_json.prepare_sensor_data(id_in="DEW", value=data['dew_point']) sensors = [temperature, pressure, humidity, dew_point] response = nm.via_json.send_short_data(sensors=sensors) return response
У данного сервиса есть одна дурацкая отличительная
особенность, состоящая в том, что нельзя отправлять данные чаще чем
раз в пять минут. Но на практике то ли у нас разные пять минут, то
ли сайт подвисает, реально данные отправляются раз в 10-15 минут.
Если всё сделано правильно, то увидим данные на сайте.

Немаловажным будет сказать, что для отправки данных следует
"дёргать" ручку /api/v1/send_data пустым GET-запросом.
Чтобы не изобретать велосипед, просто поручим это делать cron.
Добавляем ещё одну строку:
*/5 * * * * /usr/bin/wget -O - -q -t 1 http://0.0.0.0:80/api/v1/send_data
А как же камера?
Пока никак. Сделанные фото можно передавать на
WeatherUnderground. Это сделать несложно через ftp
from ftplib import FTPdef send_image_to_wu(image): session = FTP('webcam.wunderground.com', wu_cam_id, wu_cam_pwd) file = open(image, 'rb') session.storbinary('image.jpg', file) file.close() session.quit()
Однако, даже просто вручную передать данные на WU у меня не
получилось ни разу. Судя по форумам техподдержки, данная фича
работает плохо и сбоит.
Альтернативной является передача изображения на narodmon.ru,
Собственно, время от времени (раз в полчаса) дёргаем ручку
/api/v1/capture_photo (которая зовёт take_photo).
Например, будем звать через cron этот bash-скрипт:
#!/bin/bashPATH_TO_PHOTO=`/usr/bin/wget -O - -q -t 1 http://0.0.0.0/api/v1/capture_photo`REQUEST='curl -F YOUR_CAM_KEY=@'$PATH_TO_PHOTO' http://narodmon.ru/post'RESULT=`$REQUEST` >/dev/null 2>&1
На сервисе сразу появится снимок:

Плюс, не забываем время от времени (например раз в семь дней)
чистить старые изображения:
#!/bin/bash bash# Notes:# This file will remove all files in camera folder older than 7 days, just run in via cron periodically (i.e. daily).find /home/pi/web-server/camera/ -type f -mtime +7 -name '*.jpg' -execdir rm -- '{}' \;
Что дальше?
В планах довести станцию до ума, как минимум оборудовать
метеобудку, когда сойдёт снег, а так же поднять датчик ветра по
весне на нужную высоту. Из софта явно нужно будет ещё допиливать по
ходу дела. Неплохо будет так же на так же на основе собираемых
данных организовать управление приборами (балласт на ветряке,
отопление).
Предвосхищая вопросы и комментарии в духе "а где же корпуса?
опять колхоз". Каюсь, пока ничего "красивого" не могу показать, жду
когда пройдут морозы, и хотя бы будет близко к нулю, чтобы пойти в
мастерскую выпиливать будку, корпуса и прочая.







 :
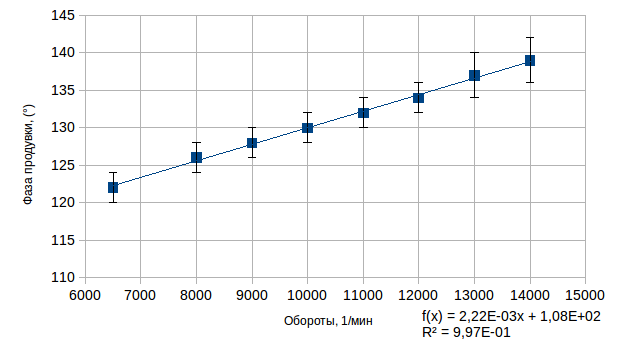
:![$f_{пр} = \frac {c_{зв }} { 2 \pi* \sqrt { \frac { V_{кшк}}{S_{пр}^2}*( {l_{пр} + 0,187[a_{пр}+h_{пр}])}} }, (1) $](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/bc0/a3c/309/bc0a3c30987556d19809b95436569867.svg)
 скорость звука в продувочном
канале;
скорость звука в продувочном
канале; объем кривошипной камеры без
учета объема продувочных каналов;
объем кривошипной камеры без
учета объема продувочных каналов; средняя длина продувочного
канала;
средняя длина продувочного
канала; средняя площадь поперечного
сечения продувочного канала;
средняя площадь поперечного
сечения продувочного канала; ширина среднего поперечного
сечения канала;
ширина среднего поперечного
сечения канала; высота среднего поперечного
сечения канала.
высота среднего поперечного
сечения канала.![$(l_{пр} + 0,187[a_{пр}+h_{пр}])$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/d10/cd9/711/d10cd9711d8aa7cbca8b1de154795213.svg) представляет собой поправку, учитывающую влияние входной части
продувочного канала.
представляет собой поправку, учитывающую влияние входной части
продувочного канала.
 чистота оборотов коленчатого вала
двигателя;
чистота оборотов коленчатого вала
двигателя; фаза продувки.
фаза продувки.












 Начало
Начало
 Переговоры с заказчиком
Переговоры с заказчиком
 Классический корпус
Классический корпус
 Cocktail Table
Cocktail Table
") Qix
(1981)
Qix
(1981)
 Успеть за 37 дней
Успеть за 37 дней
 Комплектующие под управление
Комплектующие под управление Схема подключения
Схема подключения
 Игры для автоматов
Игры для автоматов
 Cocktail Table
Cocktail Table Классический корпус
Классический корпус
 3D модели автоматов
3D модели автоматов
 Примерка Артов
Примерка Артов
 Арты
Арты
 Directed by...
Directed by...
 Bartop
Bartop В сборе со стойкой
В сборе со стойкой Cocktail Table
Cocktail Table Cocktail Table 2
Cocktail Table 2 Упаковка
Упаковка















") Тонкий слой деревянной пыли лёг на всё в
радиусе комнаты, а "осколки" фанеры удачно легли в заранее
подготовленный карман. Однако, для борьбы с пылью в какой-то момент
я начал использовать пульверизатор. Помогало слабо, но лучше, чем
ничего :)
Тонкий слой деревянной пыли лёг на всё в
радиусе комнаты, а "осколки" фанеры удачно легли в заранее
подготовленный карман. Однако, для борьбы с пылью в какой-то момент
я начал использовать пульверизатор. Помогало слабо, но лучше, чем
ничего :)
 Нарезаем пластиковый бокс на куски
Нарезаем пластиковый бокс на куски Теперь с помощью алгоритмов распознавания
лиц и Python вы сможете с лёгкостью отслеживать всех людей, которые
приближаются к вашей двери.
Теперь с помощью алгоритмов распознавания
лиц и Python вы сможете с лёгкостью отслеживать всех людей, которые
приближаются к вашей двери.
.") Компьютер Nvidia Jetson Nano 2GB имеет
много общего с Raspberry Pi оба представляют собой одноплатные
компьютеры на ОС Linux. Отличие состоит в том, что с целью
ускорения работы моделей глубокого обучения модуль Nvidia Jetson
оснащён 128-ядерным графическим процессором Nvidia и поддерживает
программно-аппаратную архитектуру параллельных вычислений (CUDA).
Компьютер Nvidia Jetson Nano 2GB имеет
много общего с Raspberry Pi оба представляют собой одноплатные
компьютеры на ОС Linux. Отличие состоит в том, что с целью
ускорения работы моделей глубокого обучения модуль Nvidia Jetson
оснащён 128-ядерным графическим процессором Nvidia и поддерживает
программно-аппаратную архитектуру параллельных вычислений (CUDA).












 Зелёный светодиод.
https://roboshop.spb.ru/radio/led-0603-green
Зелёный светодиод.
https://roboshop.spb.ru/radio/led-0603-green
 Схема Свецве. Светодиод заменён на 3 диода
для корректного расчёта.Плату даже травить не пришлось, просто на
текстолите промежутки нарезал
Схема Свецве. Светодиод заменён на 3 диода
для корректного расчёта.Плату даже травить не пришлось, просто на
текстолите промежутки нарезал

 Электроника Свецве
Электроника Свецве
 Свецве. работа в темноте
Свецве. работа в темноте Крепление скотчем
Крепление скотчем
 Световоды
диной 70 - 100 мм
Световоды
диной 70 - 100 мм Процесс распихивания и крепления световодов
Процесс распихивания и крепления световодов Свецве. Итог
Свецве. Итог Свецве. Итог
Свецве. Итог




























































































 две пластинки нержавейки ждут касания воды
две пластинки нержавейки ждут касания воды
 HC-SR04
смотрит на воду в баке
HC-SR04
смотрит на воду в баке
 поплавок с герконом. Такой без проблем тянет
12В, 0.4А
поплавок с герконом. Такой без проблем тянет
12В, 0.4А
 датчик давления крови. Достаточно
чувствительный прибор
датчик давления крови. Достаточно
чувствительный прибор
 Измеритель EC/TDS на TL074.
http://www.octiva.net/projects/ppm/
Измеритель EC/TDS на TL074.
http://www.octiva.net/projects/ppm/
 измеритель влажности на таймере 555.
http://www.emesystems.com/OLDSITE/OL2mhos.htm
измеритель влажности на таймере 555.
http://www.emesystems.com/OLDSITE/OL2mhos.htm
 демо-плата EVAL-0349 от Analog
демо-плата EVAL-0349 от Analog
 схемы EVAL-0349 с сайта analog.com
схемы EVAL-0349 с сайта analog.com
 EC сенсор с удлиннителем примеряется в
гидросистему аппарата полива растений
EC сенсор с удлиннителем примеряется в
гидросистему аппарата полива растений
 Калибровка стального датчика давления
Калибровка стального датчика давления
 измеритель pH.
http://www.emesystems.com/OLDSITE/OL2ph.htm
измеритель pH.
http://www.emesystems.com/OLDSITE/OL2ph.htm
 как ни
странно, это заработало
как ни
странно, это заработало этот вариант стал ещё лучше, уменьшившись
в размерах и получив экран
этот вариант стал ещё лучше, уменьшившись
в размерах и получив экран
 схема типичного применения LMP91200 из
даташита. ti.com
схема типичного применения LMP91200 из
даташита. ti.com
 Рекомендуемый в даташите на LMP91200 дизайн платы
Рекомендуемый в даташите на LMP91200 дизайн платы
 Изолятор питания B0505S-1W
Изолятор питания B0505S-1W

 Счётчик воды для шланга
Счётчик воды для шланга
 Счётчик воды с резьбой
Счётчик воды с резьбой
 Сенсор концентрации углекислого газа MG811
Сенсор концентрации углекислого газа MG811
 разные варианты драйвера нагрузок, до и
после испытаний
разные варианты драйвера нагрузок, до и
после испытаний
 клемма поплыла
клемма поплыла
 светлые трубочки идущие в канистры -
расходный материал
светлые трубочки идущие в канистры -
расходный материал





