
Перед началом изложения хочу оговориться, что моя основная специализация бортовое оборудование так что из моего описания может вполне получиться идеальный самолёт для технолога. Тех, кого этот подход не пугает, а также всех тех, кому интересно зачем в кабине экипажа нужны все эти кнопки и ручки прошу оценить первую публикацию: Силовая установка.

Кликабельная картинка, чтобы рассмотреть получше:
Про силовую установку
Силовая установка общее название двигателей летательный аппаратов. Начну с них потому, что без двигателей самолет не самолет, а в лучшем случае планер. Цена двигателей, к слову, составляет половину стоимости авиалайнера и компетенциями в разработке современных гражданских авиадвигателей обладают гораздо меньше стран, чем тех, кто обладают компетенциями в разработке самолетов.
На авиалайнерах сейчас ставят почти исключительно двухконтурные турбореактивные двигатели (ТРД). Вот принципиальная схема такого двигателя:

Детали устройства можно прочитать во многих источниках, начиная с Википедии. Для нас, электронщиков, важно понимать следующие факты о работе такого двигателя:
- Компрессор сжимает забираемый снаружи воздух перед подачей его в камеру сгорания,
- В камере сгорания к воздуху подмешивается топливо,
- В камере сгорания происходит постоянное горение топливовоздушной смеси, приводящее к тому, что разогретый газ расширяется в сторону турбины,
- Турбина крутится под воздействием расширяющихся газов и крутит компрессор и/или вентилятор,
- Как правило, в двигателях бывает две связки турбина-компрессор: высокого давления и низкого давления. Они могут крутиться независимо друг от друга,
- Основную тягу, как это ни странно, даёт не горячий газ, выходящий из сопла, а вращение вентилятора,
- Обороты и тягу двигателя можно регулировать подачей топлива,
- В большинстве современных авиационных двигателей работой
двигателя управляет специальный компьютер FADEC. Этот
прибор анализирует параметры работы двигателя, внешние условия и
управляющие сигналы от органов управления двигателем и управляет
всеми приводами, влияющими на работу двигателя, например, топливным
краном. Часть названия Full Authority означает, что:
- FADEC отвечает за ВСЕ аспекты работы двигателя,
- Только FADEC отвечает за работу двигателя, т. е. нет никакого резервного контура управления, механических тяг управления газом и т. д.
- Кроме сигналов от органов управления двигателем FADEC
анализирует данные от:
- Системы воздушных сигналов (СВС): давление и температуру наружного воздуха, воздушную скорость самолёта для уточнения параметров работы,
- Датчиков обжатия шасси для дополнительного контроля возможности
включения реверса,
Скрытый текстОбжатие шасси термин, означающий, что самолёт не летит, опираясь на крылья, а стоит/едет по земле, опираясь на шасси. При этом амортизаторы шасси сжимаются и специальные датчики датчики обжатия шасси регистрируют это. Важно понимать, что коснуться полосы колёсами и обжать шасси это два разных события. - Системы кондиционирования воздуха чтобы вносить поправки в режимы работы двигателя в зависимости от количества воздуха, отбираемого для пассажирского салона и/или для работы пневматической системы для запуска второго двигателя.
- Основным параметром, ограничивающим предел мощности двигателя, является температура газов сразу за камерой сгорания. Разработчики двигателя хотели бы её поднять, но фундаментальные свойства известных материалов пока не позволяют этого сделать.
Как запускать двигатель
Чтобы запустить двигатель, надо раскрутить турбину высокого давления, подать топливо и дать первоначальную искру. После того, как турбина раскрутится примерно до 50% оборотов двигатель начнёт раскручивать себя сам.
Первоначальную раскрутку двигателя можно осуществлять электрическим стартер-генератором (для маленьких двигателей) или специально поданным воздухом высокого давления от пневматической системы. К слову, воздух высокого давления в пневматической системе берется от второго (уже запущенного) двигателя, вспомогательной силовой установки (ВСУ) или внешнего источника.
Скрытый текст
ВСУ это такой небольшой (относительно
основных, конечно) газотурбинный двигатель, который предназначен
для генерации электроэнергии, давления в гидросистемах и воздуха
высокого давления для запуска основных двигателей. Он меньше и его
проще запустить электромотором от батарей. А раскручивать большие
двигатели можно уже с его помощью. Также его используют, когда
техникам надо поработать с оборудованием, а гонять большие
двигатели, чтобы получить источник энергии, нецелесообразно.
Подробнее про ВСУ расскажу в другой публикации.
Пример пульта управления, используемого для запуска двигателя:

Для автоматического запуска надо выполнить следующие действия:
- Переключатель ENG START (1) перевести в положение IGN/ON
- Тумблер ENG MASTER (2) перевести в положение ON (вперёд). В
этот момент FADEC:
- Откроет кран пневматической системы для раскрутки турбины и компрессора высокого давления
- Откроет кран топливной системы чтобы было чему гореть
- Даст искру на свечи зажигания
- Контролировать процесс запуска. Если что-то пойдёт не так немедленно перевести тумблер запуска обратно в положение OFF
- Когда двигатель успешно выйдет на обороты малого газа запустить второй двигатель по аналогичной процедуре
- Когда оба двигателя запустятся перевести тумблер ENG START в положение OFF во время нормальной работы двигателя дополнительные искры на свечах зажигания не нужны
- Во время автоматического запуска двигателя кнопки ручного запуска (3) не используются
Иногда нам надо покрутить двигатель, но не заводить его. Например, для проверок или чтобы помыть его внутренности керосином после консервации. В этом случае переключатель ENG START надо переводить в положение CRANK (прокрутка). Вся процедура запуска будет та же, но искры на свечах не будет. Нет искры нет огня.
Как управлять двигателем
Управление двигателями осуществляется с помощью рычагов управления двигателями (РУД).

На каждый двигатель свой рычаг. Тут всё просто: толкаем рычаг от себя двигатель крутится быстрее, тяга растёт. Тянем рычаг на себя крутится медленнее. Так как РУД не связан с топливным дросселем напрямую, можно не бояться, что мы сожжем двигатель большим количеством топлива или заглушим недостаточным. FADEC в любом случае не даст ему превысить предельную температуру выхлопных газов или заглохнуть. Кстати, с ограничением температуры выхлопных газов связан тот факт, что в жару и/или на высокогорных аэродромах двигатель может выдать меньшую тягу.
В районе малого газа у рычага упор. Чтобы разблокировать перевод рычагов в зону режимов реверса, надо потянуть за специальную скобу. При реверсе двигателя специальные створки разворачивают поток от вентилятора двигателя в обратном направлении помогая самолету остановиться:

Вообще, с помощью реверса самолёт может даже поехать назад, но, так как в этом режиме для двигателей, висящих под крылом, возможна ситуация засасывания в двигатель мусора и даже камней с взлётно-посадочной полосы, для авиалайнеров не рекомендуется включать реверс на малых скоростях.
Для включения реверса FADEC анализирует не только положение РУДов, но и датчики обжатия шасси, так что случайно в воздухе запустить реверс невозможно.
Ещё у двигателей, бывает специальный аварийный режим. Включить его можно пересиливанием РУДов в положение, находящееся дальше взлетного режима (на картинке это положение APR Automatic Power Reserve). Такой режим используется только при отказе одного из двигателей при взлете, когда надо гарантировать набор высоты в ущерб ресурса рабочего двигателя. Правда после приземления работающий в аварийном режиме двигатель придется перебрать.
Про индикацию и сигнализацию
Данные работы двигателей, как правило, отображаются на неотключаемой части центрального дисплея пилотов и на специальной странице с расширенными данными по двигателю.

В постоянно индицируемом окне статуса работы двигателя доступны следующие данные:
а. Текущие обороты вентилятора двигателя (напрямую влияют на тягу)
б. Температура выхлопных газов параметр работы двигателя, часто ограничивающий максимальную тягу. FADEC ограничивает ток топлива в том числе, чтобы не расплавить конструкцию лопаток турбин. Лётчику тоже важно понимать, почему обороты не растут, хотя он просит
в. Заданные обороты вентилятора двигателя (разгон двигателя с малого газа до взлётного режима занимает десятки секунд и текущие обороты не всегда совпадают с заданными)
г. Обороты турбины высокого давления. Помните, что турбин две и они работают независимо? Так вот данные оборотов турбины высокого давления важны при запуске двигателя. В полёте контролировать их не надо
д. Текущий расход топлива
е. Признак включения реверса
ж. Установившийся режим работы двигателя (малый газ, взлётный, набор высоты)
На специальной странице дополнительных параметров работы двигателя может выводиться, например, такая информация как:
- Уровень, давление и температура масла,
- Уровень вибрации двигателя,
- Количество топлива, израсходованного с момента последнего запуска,
- Давление воздуха в пневматической системе,
- И т.д.
Варианты газотурбинных двигателей
Двигатели, в которых вентилятор вынесен за пределы мотогондолы (корпуса двигателя) называются турбовинтовыми. Они обладают лучшими взлетно-посадочными характеристиками, но быстро теряют эффективность при росте скорости больше 0.5 скорости звука (приблизительно). Поэтому они в основном применяются в самолётах для местных авиалиний и военно-транспортной авиации, где возможность использования коротких и неподготовленных взлетно-посадочных полос важнее, чем крейсерская скорость. В конструкции таких двигателей также часто применяется понижающая трансмиссия, как, например, на рисунке ниже.

Газотурбинные двигатели также используются на вертолётах, только в этом случае они крутят не пропеллер, а винт, сами двигатели в этом случае называются турбовальными. Хорошее видео, иллюстрирующее принципы их работы: https://www.youtube.com/watch?v=uVjStAxMFEY
Ещё газотурбинные (турбовальные) двигатели пытались приладить к танкам (Т-80), но стоимость и сложность в обслуживании перевесили большую удельную мощность такого двигателя.
Нелокализованный разлёт осколков
Одним из свойств двигателя, сильно влияющим на конструкцию бортового оборудования, является так называемый нелокализованный разлёт осколков двигателя. Это событие возникает при взрывном разрушении двигателя, когда лопатки компрессоров и турбин разлетаются во все стороны.

При оценке последствий такого отказа, считается, что осколки обладают бесконечной энергией, которой достаточно, чтобы пробить любые преграды, разрубить любые трубы и провода. Для обеспечения безопасного завершения полета в случае такого нелокализованного разлета разработчики архитектуры электронного оборудования для каждого критического провода должны предусмотреть резервный, проложенный в отдельном канале, который не может быть перебит тем же осколком, что и основной провод.
Примечание для впечатлительных: на самом деле разработчики двигателей делают всё возможное, чтобы избежать нелокализованного разлёта, и действительно они случаются очень редко. Даже попадание крупной птицы в двигатель не сломает его. Но авиация отрасль консервативная и мы закладываем в архитектуру противодействие всем потенциально возможным рискам.
Пояснение про 'идеальный самолёт для
технологов':
Идеальный самолёт глазами инженеров.
Лично мне взгляд технологов особенно симпатичен.



 Структура сети.
Структура сети. Результаты обучения.
Результаты обучения.
 Данные на входе у сети со стёклами.
Данные на входе у сети со стёклами.
 Вход и
выход слоя нормализации.
Вход и
выход слоя нормализации.
 Структура сети.
Структура сети. Результаты обучения.
Результаты обучения.
 Результаты обучения.
Результаты обучения.




 ;
; ;
; ;
; ;
; .
. ;
; .
.






 . Результаты моделирования
при отработке входного сигнала 150 об/мин показаны ниже.
. Результаты моделирования
при отработке входного сигнала 150 об/мин показаны ниже.




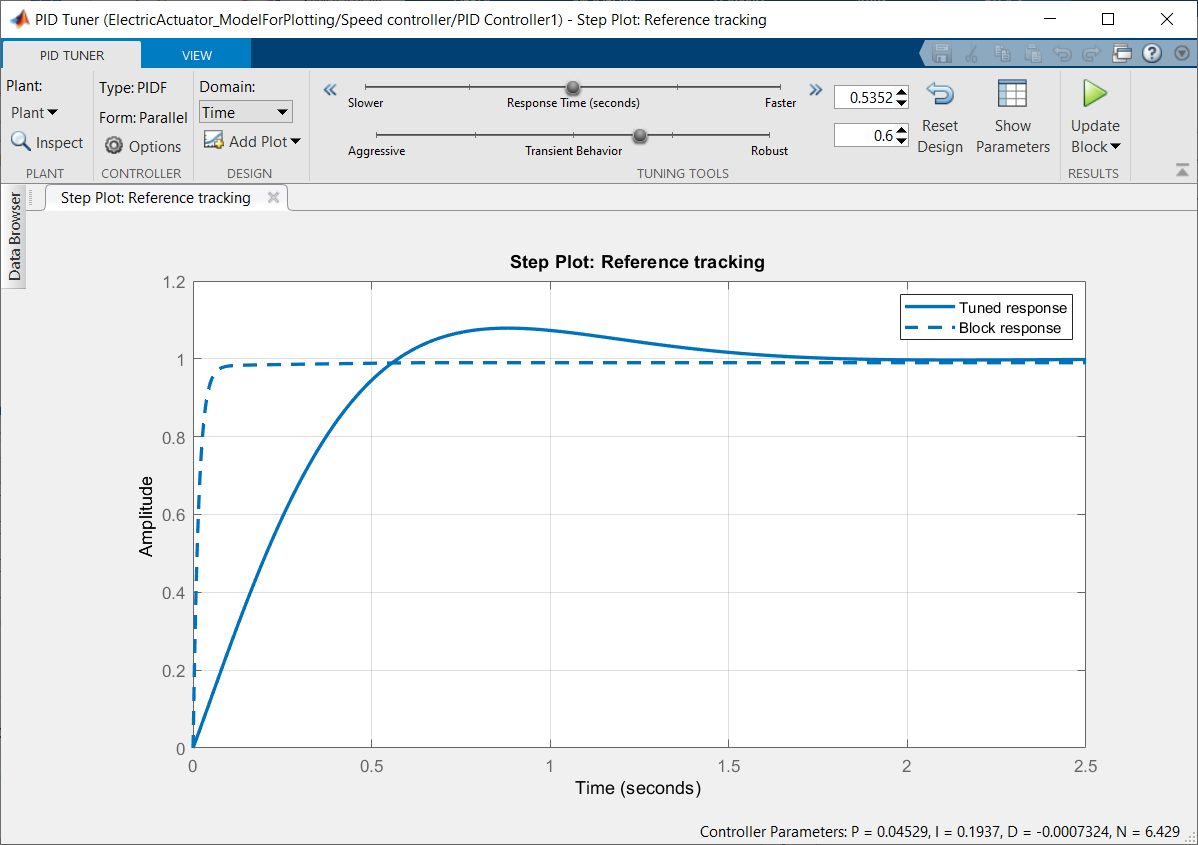






 , переходный процесс
апериодический с временем переходного процесса, равным 2.5 с.
, переходный процесс
апериодический с временем переходного процесса, равным 2.5 с.






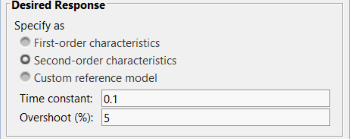
 ) передаточной функции процесса в
секундах. В поле Overshoot (%) величина перерегулирования
(
) передаточной функции процесса в
секундах. В поле Overshoot (%) величина перерегулирования
( ). Соотношения между
постоянной времени колебательного звена и временем переходного
процесса (
). Соотношения между
постоянной времени колебательного звена и временем переходного
процесса ( ) и коэффициентом
демпфирования (
) и коэффициентом
демпфирования ( ) и перерегулированием
выражаются зависимостями [1]:
) и перерегулированием
выражаются зависимостями [1]:



































 и продолжительности моделирования
и продолжительности моделирования
 . Эксперимент рекомендуется
начинать, когда система вышла на установившейся режим, т.е. когда
закончился переходный процесс. Установим начало эксперимента в 0.2
с. Продолжительность моделирования определяется требуемым временем
нарастания согласно формуле
. Эксперимент рекомендуется
начинать, когда система вышла на установившейся режим, т.е. когда
закончился переходный процесс. Установим начало эксперимента в 0.2
с. Продолжительность моделирования определяется требуемым временем
нарастания согласно формуле  .
. . В нашем случае оно
равно 4.83 рад/с. Величина перерегулирования 10% примерно
соответствует запасу по фазе 60, поэтому оставляем это значение без
изменения.
. В нашем случае оно
равно 4.83 рад/с. Величина перерегулирования 10% примерно
соответствует запасу по фазе 60, поэтому оставляем это значение без
изменения.







 . В нашем случае это
значение равно 0.0041.
. В нашем случае это
значение равно 0.0041. . Для нашей системы время
начало эксперимента будет
. Для нашей системы время
начало эксперимента будет  с, а время завершения
с, а время завершения
 с. Оба значения указываются
в полях Step time соответствующих блоков Step в подсистеме Tune
enable.
с. Оба значения указываются
в полях Step time соответствующих блоков Step в подсистеме Tune
enable.