
На пути в программировании stm8 есть развилка, о ней сегодня и поговорим.
Определимся что речь будет идти о средах которые могут писать под си. Для начала поговорим о подходах, я выделю 2 основных.
Первый установка ST Visual Develop и выбор в качестве компилятора COSMIC Бывший платный, а ныне бесплатный, но со своими заморочками; регистрация, получение ключа, и прочие танцы с бубном.
Второй же вариант, более простой VS Code + PlatformIO и компилятор SDCC полностью свободный. И опять же не все так просто. Sdcc не умеет исключать не используемые функции. Я решил этот вопрос хоть и успешно, но не без дополнительных действий при написании кода.
Первая среда, для любителей всё делать правильно
Для начала нам нужен ST Visual Develop. Устанавливаем и ставим запуск ярлыка всегда от администратора. В придачу к нему нам дают ST Visual Programmer, полезный инструмент, особенно когда стоит защита от записи и надо разблокировать микроконтроллер, а ведь китайские blue pill всегда приходят заблокированными. Китайцы бояться что мы украдём их круто оптимизированный Blink.
Вот так выглядит STVD
 Я так понял её создали, когда в моде были
16 битные цвета...
Я так понял её создали, когда в моде были
16 битные цвета...
Дальше нужно будет получить компилятор COSMIC и его лицензионный ключ. Заполняем то что просят, получаем дистрибутив и делаем запрос ключа по электронной почте (тут рулетка кому то сразу придёт, кому то придётся подождать).
После пройденного лабиринта из форм и запросов, когда всё уже установлено, начнём


Распакуем куда-нибудь и заходим в папку STM8S_StdPeriph_Lib\Project\STM8S_StdPeriph_Template. Тут у нас шаблон проекта stm8s_conf.h это конфигурационный файл библиотеки, через него выбирается контроллер. Зайдём в main тут сразу с первых строк
#include "stm8s.h" это ссылка на
основную библиотеку, а так же кусок кода отладки который начинается
с #ifdef USE_FULL_ASSERT, без отладочного кода
будут сыпаться ошибки.Теперь когда мы прошлись по верхам давайте пробовать запускать библиотеку. Добавляем в проект из шаблона main и конфигурационный файл в. В include files добавляем всё из STM8S_StdPeriph_Lib\Libraries\STM8S_StdPeriph_Driver\inc.

Добавим stm8s_gpio.c и соберём простецкую мигалку. У меня один из светодиодов висит на D3, конфигурация ноги на выход выглядит так:
GPIO_DeInit(GPIOD);GPIO_Init(GPIOD, GPIO_PIN_3, GPIO_MODE_OUT_PP_LOW_SLOW);
Её вписываем в main до бесконечного цикла.
А вот функция смены состояния.
GPIO_WriteReverse(GPIOD,
GPIO_PIN_3); вписываем её в бесконечный цикл.Но вот незадача, в SPL нету функций задержки, скопипастим из примера GPIO в библиотеке. Там она выглядит следующим образом.
void Delay(uint16_t nCount){ /* Decrement nCount value */ while (nCount != 0) { nCount--; }}
Впишем её в конец перед
#ifdef USE_FULL_ASSERT. Так же
впишем её прототип в начало, где под это выделено место в шаблонном
main.
/* Private function prototypes -----------------------------------------------*/void Delay (uint16_t nCount);
Ну и наконец впишем функцию со значением в бесконечный цикл после функции смены состояния:
Delay(0xFFFF);Подключаем ST-Link и прошиваем, для этого нажимаем Start Debugging и Run. Светодиод моргает значит всё хорошо.
У кого не получилось вот полный main.c
/** ****************************************************************************** * @file Project/main.c * @author MCD Application Team * @version V2.3.0 * @date 16-June-2017 * @brief Main program body ****************************************************************************** * @attention * * <h2><center> COPYRIGHT 2014 STMicroelectronics</center></h2> * * Licensed under MCD-ST Liberty SW License Agreement V2, (the "License"); * You may not use this file except in compliance with the License. * You may obtain a copy of the License at: * * http://www.st.com/software_license_agreement_liberty_v2 * * Unless required by applicable law or agreed to in writing, software * distributed under the License is distributed on an "AS IS" BASIS, * WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. * See the License for the specific language governing permissions and * limitations under the License. * ****************************************************************************** */ /* Includes ------------------------------------------------------------------*/#include "stm8s.h"/* Private defines -----------------------------------------------------------*//* Private function prototypes -----------------------------------------------*/void Delay (uint16_t nCount);/* Private functions ---------------------------------------------------------*/void main(void){GPIO_DeInit(GPIOD);GPIO_Init(GPIOD, GPIO_PIN_3, GPIO_MODE_OUT_PP_LOW_SLOW); /* Infinite loop */ while (1) {GPIO_WriteReverse(GPIOD, GPIO_PIN_3); Delay(0xFFFF); } }void Delay(uint16_t nCount){ /* Decrement nCount value */ while (nCount != 0) { nCount--; }}#ifdef USE_FULL_ASSERT/** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval : None */void assert_failed(u8* file, u32 line){ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* Infinite loop */ while (1) { }}#endif/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
Теперь посмотрим со стороны на эту среду.
По плюсам; у неё есть полноценная отладка, поддержка SPL из коробки. По минусам; она старая из этого вытекает, не очень приятный интерфейс и старый диалект си, на который многие свежие библиотеки придётся переписывать, в частности ставить переменные только вначале функций. Вес кода оставляет желать лучшего. Ну последний камень, этот инструмент может просто взять и вылететь, такое бывает, нечасто, но всё же.
Вторая среда, для тех кто не любит заморачиваться.
Второй подход это свободный и обновляемый компилятор SDCC, а так же среда PlatformIO.
Для начала установим VS Code

Ждём пока миллион ползунков пройдёт до конца и перезапускаем программу. Открываем расширение (может быть и само откроется). Создаём новый проект и выбираем ближайшую плату с stm8s (микроконтроллер можно будет изменить в конфигурационном файле). В качестве фреймворка выбираем SPL
Не удивляйтесь, проект будет создаваться прилично долго, потому как он на ходу будет подгружать компилятор, библиотеки и тд. И вот перед нами возник девственно голый проект, закрываем его он нам больше не нужен. В меню где мы создавали проект, открываем пример spl-blink, суть в том что blink генерирует неплохой шаблон в котором можно сразу писать. Правим пример под себя и прошиваем, всё моргает.
Разберем поподробнее среду разработки. Во первых весь проект должен лежать в src, иначе среда ведёт себя неадекватно. Во вторых открываем stm8s_conf.h и видим что все библиотеки кроме GPIO закомментированы, если этого не сделать то у мк не хватит памяти что бы поместить весь SPL в микроконтроллер (помните в начале я говорил что он загружает все функции что видит в код?).
Выходит что тут мы должны будем ручкам включать и отключать библиотеки, а если пойти дальше в оптимизацию как я и сделал, то нужно будет каждую функцию включать и отключать. Часть конфигурационного файла у меня выглядит следующим образом:
/* Private define ------------------------------------------------------------*/#define _GPIO_DeInit#define _GPIO_Init#define _GPIO_WriteReverse#define _CLK_DeInit#define _CLK_SYSCLKConfig#define _TIM4_DeInit#define _TIM4_ITConfig#define _TIM4_ClearITPendingBit#define _TIM4_Cmd#define _TIM4_TimeBaseInit#define _TIM4_ClearFlag#define _HAL_GPIO_WritePin#define _GPIO_WriteLow#define _GPIO_WriteHigh//#define STM8S003/* Includes ------------------------------------------------------------------*/#include "stm8s.h"/* Uncomment the line below to enable peripheral header file inclusion */#if defined(STM8S105) || defined(STM8S005) || defined(STM8S103) || defined(STM8S003) ||\ defined(STM8S001) || defined(STM8S903) || defined (STM8AF626x) || defined (STM8AF622x)// #include "stm8s_adc1.h" #endif /* (STM8S105) ||(STM8S103) || (STM8S001) || (STM8S903) || (STM8AF626x) */#if defined(STM8S208) || defined(STM8S207) || defined(STM8S007) || defined (STM8AF52Ax) ||\ defined (STM8AF62Ax)// #include "stm8s_adc2.h"
Каждую функцию я включаю через макрос, для этого у меня переписана большая часть SPL. Если вам оптимизация сильно не нужна, то такой упоротостью можете не заниматься.
Пройдёмся по преимуществам: работает почти из коробки, полностью бесплатно без попрошайничества, редакции языка обновляются и не придётся учить и переписывать код под си 80-90г. Сам интерфейс настраиваемый и намного приятнее. Для тех кто не любит win есть linux версия.
По минусам: нету полноценной отладки (над ней активно работают, но пока ничего приближённого к cosmic я не видел), в проекте небольшой хаос, раскидать по папкам пока нельзя.
Послевкусие.
Ну и на последок есть ещё среды, варианты и компиляторы, но либо это тот же SDCC вкрученный силой в Eclipse или ещё куда и работающий хуже чем в VS Code, либо это платные варианты IAR, Raisonance. Я лично пользуюсь и тем и тем, но чаще VS Code. Рекомендовать ничего не буду каждому своё, увидимся в комментариях)




















 Мы в проекте
Мы в проекте 
 v1
v1
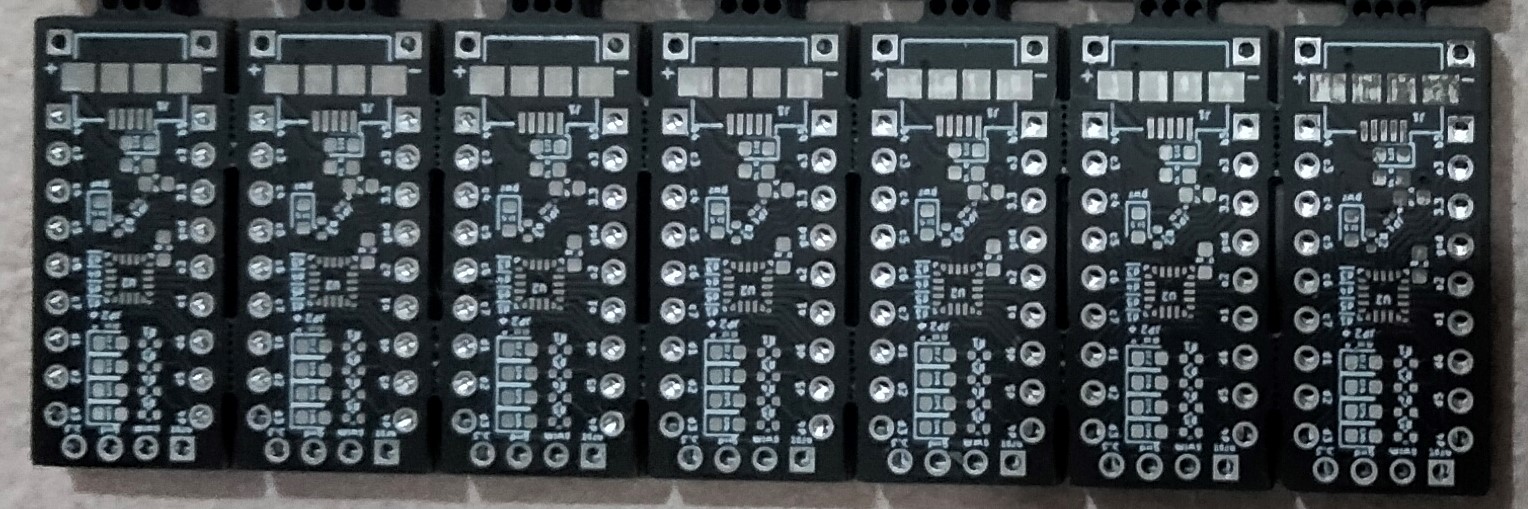 Детальное фото печатной
платы
Детальное фото печатной
платы
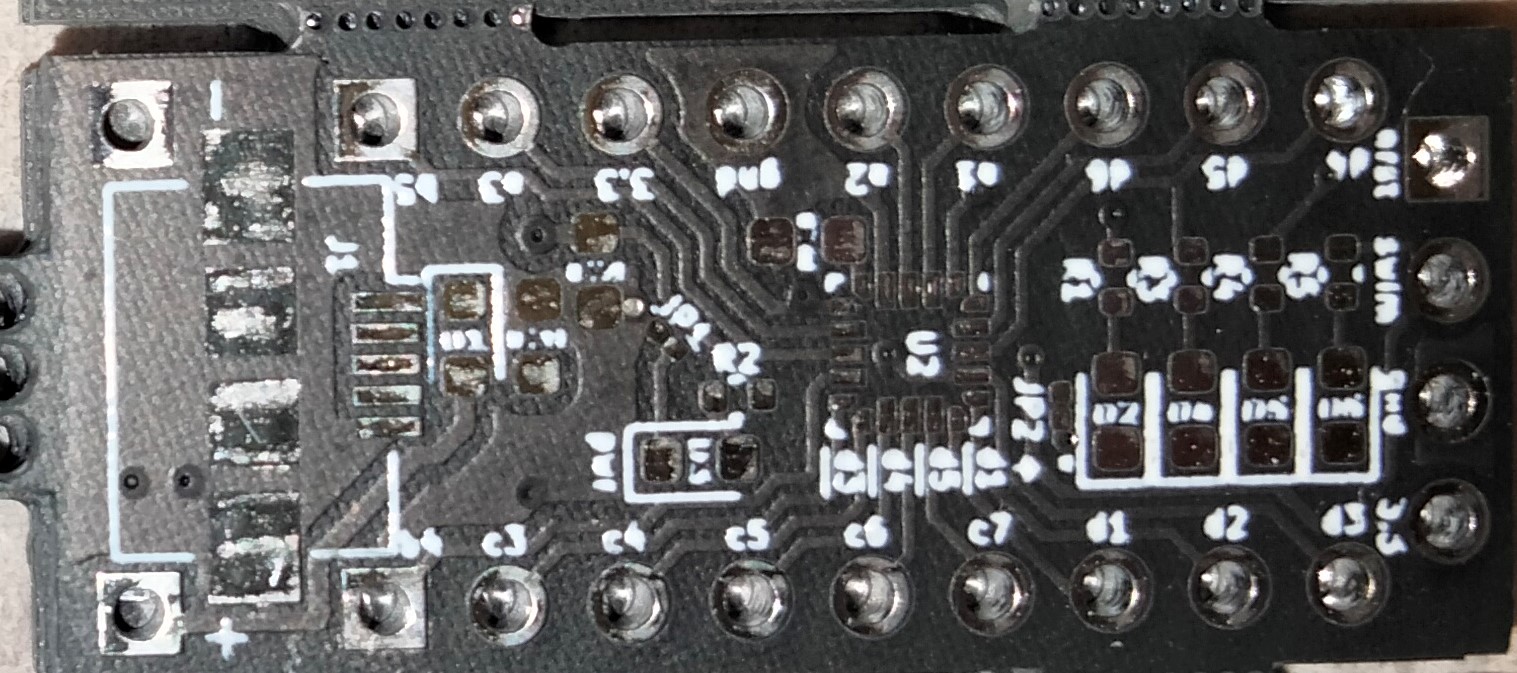

") Фото ужасное, но переснять не могу уже раздал их)
Фото ужасное, но переснять не могу уже раздал их)

 Сегодня никого не удивить
возможностью разрабатывать на C++ под микроконтроллеры. Проект mbed
полностью ориентирован на этот язык. Ряд других RTOS предоставляют
возможности разработки на С++. Это удобно, ведь программисту
доступны средства объектно-ориентированного программирования.
Вместе с тем, многие RTOS накладывают различные ограничения на
использование C++. В данной статье мы рассмотрим внутреннюю
организацию C++ и выясним причины этих ограничений.
Сегодня никого не удивить
возможностью разрабатывать на C++ под микроконтроллеры. Проект mbed
полностью ориентирован на этот язык. Ряд других RTOS предоставляют
возможности разработки на С++. Это удобно, ведь программисту
доступны средства объектно-ориентированного программирования.
Вместе с тем, многие RTOS накладывают различные ограничения на
использование C++. В данной статье мы рассмотрим внутреннюю
организацию C++ и выясним причины этих ограничений. Привет!
Привет!