

Введение
Эта статья является продолжением публикации Взгляд в прошлое. Технология 18 века.
В ней мы построили реально работающий паровой двигатель, который должен стать главной частью будущего парового мотоцикла, и даже провели пробные эксперименты по его запуску на воздухе.

Теперь нужно решить энергетический вопрос. И тут начинаются основные отличия от двигателей внутреннего сгорания (ДВС). В таких двигателях бензин, смешиваясь с воздухом, попадает в цилиндр двигателя и при воспламенении этой воздушно-топливной смеси выделяется энергия. Расширившиеся продукты горения давят на поршень, производя работу. Но вот у паровых машин, энергия рождается не в двигателе. Она рождается в котле. Котёл производит пар, который в свою очередь и будет давить на поршень нашего двигателя. Эту древнюю энергию нам и требуется обуздать!
Устройство
Паровой котёл котёл, предназначенный для генерации насыщенного или перегретого пара. Может использовать энергию топлива, сжигаемого в своей топке, электрическую энергию или утилизировать теплоту, выделяющуюся в других установках. (Википедия)
Существует два основных типа котлов: классический и прямоточный. Первый тип чаще всего использовался для работы паровых машин. Его можно описать как железный резервуар, в который врезана топка. Топливо горит в топке, обогревая воду в резервуаре. Вода в нём начинает кипеть и создаётся пар под давлением. Такой тип использовался на паровозах и всех первых паровых машинах:

У классических котлов есть как преимущества, так и недостатки. Преимущества заключаются в том, что для создания давления пара не требуется каких либо насосов, так как накопленная энергия воды может ещё долго снабжать двигатель паром даже при отсутствии огня. Такие котлы не очень требовательны к качеству воды. Паровозы заправляли самой обычной водой из речек, родников, колодцев и прочее.
Прямоточный котёл можно представить как длинную, компактно свёрнутую трубку, обтекаемую пламенем, в которую насосом закачивают воду. Такой тип котла обладает целым рядом преимуществ:
- Позволяет создавать пар большего давления при меньшей массе и небольшому объёму котла.
- Из-за того, что в трубке не так много носителя, такой котёл считается более безопасным (не запасается большое количество энергии).
- Быстрый выход на режим, так как не нужно прогревать большое количество воды.
Для лёгкого понимания работу такого котла можно представить в упрощённой форме:

Создание прямоточного котла
И, конечно, мне захотелось сделать именно прямоточный котёл.
Подобрав длинные нержавеющие трубки разного сечения, я сварил их вместе таким образом, чтобы сечение постепенно увеличивалось. Затем, весь этот 8 метровый кишечник был компактно свёрнут и уложен в раму мотоцикла. Внешние стенки, которые должны удерживать пламя и направлять его в нужную сторону, были сделаны из простой жести. Насос, закачивающий воду (носитель), изготовил из газового доводчика, который обычно придерживает капоты и багажники автомобилей. Конструктивно, доводчик это готовое изделие. Мне необходимо было только приварить вход и выход для воды и приделать клапан, который не пускал бы закаченную воду обратно. Насос подвижно крепился одной своей частью к раме, а второй к кривошипу на валу колеса. С помощью гибкого шланга высокого давления (тормозной шланг от авто) вода под давлением закачивалась в котёл, а забиралась из отдельного бачка, располагавшегося выше насоса. Горелку сделал по типу кровельных, такими рабочие греют рубероид на крышах зданий. Чтобы процент обтекания трубок был больше, горелки поставил сразу две.
Итог
Испытания парового мотоцикла, оснащённого прямоточным котлом, с самого начала пошли не так. Самой первой проблемой стало отсутствие начального давления в котле. Приходилось руками покручивать колесо, чтобы насос отправлял некое количество воды в трубопровод. Но, когда я открывал ручку газа (подавая пар на двигатель) давление пара мгновенно падало, не успевая закрутить колесо. Выход нашёлся не сразу. Был сделан небольшой воздушный ресивер после насоса. Он работал как пружина для воды. Запасал энергию сжатия от насоса и отдавал её обратно, когда насос был в мёртвой точке или в фазе всасывания питательной воды.
Двигатель заработал! Но проработал, около 10 секунд. Золотниковый клапан заклинил. При разборе двигателя, никаких проблем выявлено не было. Собрав его обратно и запустив снова, я столкнулся с той же проблемой. Она оказалась приходящей и уходящей сама собой. После изучения этой проблемы, нашлась ошибка в расчётах теплового расширения. Изначально, золотник представлял собой цельную деталь из фторопласта, а у него, как оказалось, очень большой коэффициент теплового расширения (22) и он при прогреве расширялся настолько, что его насмерть заклинивало в корпусе.
После подробных и тщательных расчётов тепловых расширений был выточен стальной золотник, оснащённый фторопластовыми кольцами, шириной 2 миллиметра.

Поскольку корпус алюминиевый, а золотник стальной, вся разница тепловых расширений была сведена практически к нулю.

Новое испытание показало, что золотник работает просто прекрасно и без замечаний. Вывешенное колесо крутилось, вода закачивалась, прямоточный котёл работал. Пришло время прокатиться. Но тут возникла новая проблема. Мне не удавалось на нём проехать больше нескольких метров. И опять я был сбит с толку. Всё же работало! На холостом ходу всё отлажено! Что ещё не так?
После долгого анализа других подобных паровых аппаратов,



я понял, что у меня слишком маленький котёл (длина обогреваемой трубки), в следствие этого при увеличении производительности, вода просто не успевала испаряться и вылетала вместе с паром в двигатель. От такого эффекта пропадает КПД всей установки, так как расширение воды слишком мало или не происходит вовсе. Увеличить длину котловой трубки уже задача не такая простая. Но и на этом моё горе не закончилось.
Во время очередных испытаний, я мучил аппарат, заставляя его работать, но состояние двигателя начало резко ухудшаться и в какой-то момент он заклинил. На этот раз, просто остудить его снегом, не помогло. Снова понадобилась капитальная переборка. Результаты вскрытия показали, что расплавились все фторопластовые кольца и даже алюминиевый поршень от нагрева расширился настолько, что начал задирать цилиндр. И это оказалось фатальной проблемой. Дело в том, что при большом расходе, данный котёл не успевал производить должное количество пара, а при маленьком расходе, он создал пар такой энергии, что просто вышел из строя весь двигатель. И не удивительно. Ведь выходные трубки котла были раскалены докрасна. То есть пар, достигал температур, порядка 600-700 *С. Как мы знаем, фторопласт распадается при 400*С. Для меня, это и стало последней каплей! Мне уже хотелось получить работоспособный мотоцикл, а я погряз в каких-то бесконечных проблемах! Нужно было переделывать в котле почти всё. И в этот-то момент я понял, что, несмотря на неоспоримые преимущества прямоточного котла, это изделие весьма не простое и требует тонкого расчёта, дополнительного регулирующего оборудования, да и насос съедал не малую часть вращательной энергии. Сложилось чёткое понимание, что, если бы я делал классический котёл, то ни одной из этих проблем просто не возникло бы!
Небольшое видео про мучения с прямоточным котлом:
Классический котёл
После всех тех бесконечных проблем с прямоточным котлом, создавая классический, я просто, можно сказать, отдыхал. Как уже говорил выше, это всего-то железная бочка, в которую врезана топка. Можно было совершенно не задумываться о температуре пара, ведь при лишнем давлении срабатывает предохранительный клапан и сбрасывает излишки, уменьшая температуру воды и поддерживая давление в заданных пределах. Не нужно было создавать начальное вращение колеса, чтобы нагнать первоначальное давление. Пар для старта был готов сразу и даже запасён с излишком. Всё, что требовалось это придумать эффективную топку. Но тут пришлось хорошенько подумать, ведь места у нас не так много.
Изготовление
На металлоприёмке я нашёл какой-то ресивер или болон из-под пропана с толщиной стенки 3-4 мм, так что габариты котла уже были заданы жёстко.
Если сильно заморачиваться с массивной и эффективной топкой, то останется мало места для самой воды (носителя). Если топка будет слишком маленькой, то у нас не будет достаточной энергии для более менее удовлетворительной крейсерской скорости, ну и сам процесс нагрева котла займёт слишком много времени.
И вот, что я придумал. Топка будет подвержена сдавливанию огромным давлением, поэтому решено было сделать её простой, сквозной и круглого сечения. Под это пошла обычная труба 100 мм. Для увеличения КПД нашей топки (теплообменника), были врезаны 12 поперечных сквозных трубок.

Я посчитал это очень выгодным, так как они обтекались бы пламенем и выхлопными газами под прямым углом,

а вода внутри них циркулировала бы под естественным эффектом конвекции. Это позволит сохранить максимальный объём воды в котле, а для нас это запас хода. И, как бонус, такую топку было легко врезать в резервуар. Следовало всего лишь сделать два отверстия по обоим краям.

Для контроля давления установил небольшой манометр. Температуру носителя контролировать не обязательно, так как она напрямую связана с давлением и явно не выходит за критическую отметку (400*С). Давление в котле решил сделать как у реальных паровозов 16 bar. Предохранительный клапан настроил на 18 bar. Теперь осталось его опрессовать. Это своего рода проверка на прочность. Котёл наполняется доверху водой и накачивается повышенное давление. Сначала, я это делал оставшимся от предыдущей котловой системы, насосом из доводчика, но сжимать такой насос при давлении более 20 bar, оказалось не простой задачкой (очень хорошо, что мы теперь можем отказаться от такого узла, ведь он забирал уйму мощности на себя). Оказалось, что опрессовывать удобнее всего углекислотным огнетушителем. Им я без труда создал давление в котле в 25 bar (это был максимум моего манометра) и, выждав несколько минут, приступил к настройке предохранительного клапана.

Итог
Котёл получился на славу. Даже давление в 25 bar оказалось ему нипочём. Он даже не начал хрустеть. Предохранительный клапан (использовал от компрессоров) срабатывал чётко, хоть и ронял давление с 18 до 9. Этот для нас очень не выгодно, но он будет срабатывать только в тех случаях, когда сам за давлением не уследишь. Так что, до его срабатывания лучше не доводить. Это будет бессмысленное выбрасывание ресурсов.
Пламя
Теперь нужно решить вопрос с огнём. Конечно, было бы красиво и приятно топить подобный мотоцикл дровами. Это же ретроспектива в прошлое, стимпанк, классичность, но, как я уже говорил, у нас очень мало для этого места, ведь наша топка чуть больше локтя. Конечно, можно туда уместить шапку угля, но этого не хватит даже на то, чтобы просто прогреть котёл. Тут пришлось отступить от романтичности и изготовить газовую горелку. На самом деле это очень эффективное, мощное и удобное топливо. Газ жидкий, поэтому его легко запасать, легко подавать в горелку и он сразу идёт под давлением, что позволяет создавать скоростной горячий поток в топке, тем самым улучшая теплообменный процесс (не требуется поддув).
Изготовление
На металлоприёмке нашёл отличные, маленьких размеров, нержавеющие бачки. Судя по их форме и синей окраске, это кислородные баки от какого-то пассажирского самолёта. Я собрал несколько таких бачков в батарею и объединил магистралями подачи газа и заправки. Объём каждого бачка примерно 1.7 л, а значит, можно будет везти с собой запас топлива более 5л. жидкого газа. Согласитесь, не плохой запас энергии.

С горелкой не стал мудрить и просто скопировал систему с советской бензиновой паяльной лампы. Тут я должен кое-что пояснить. Паяльная лампа устроена таким образом, что бензин сначала попадает в некую полость, где должен испариться и уже в виде паров выпускается в зону горения. А пламя горелки обогревает эту самую испарительную камеру. То же самое потребуется и нам. Представьте, что будет, если жидкий газ начнёт вылетать из такой горелки Процесс испарения газа относительно долгий, а ко всему прочему, ещё и сопровождается криогенным эффектом. Пламя из такой горелки будет длинным, не эффективным, не экономичным и даже пожароопасным.


Эксперимент (рис А)Пламя с не прогретой горелки (рис В)Правильный режим, прогретая горелка
Поэтому подавать газ, в нашу горелку, следует плавно, чтобы она успела прогреться.
Испытания котла прошли как по маслу. Заправил примерно 35 л воды, горелку вывел на полную мощность и ждал. Через 14 минут вода закипела, и давление потихоньку начало подниматься. Примерно через такое же время в котле было 16 bar.
Для управления подачей пара, я использовал простой водопроводный шаровой кран, который отлично справлялся и с температурой, и с давлением. В них используется тот же самый фторопласт, так что проблем, думаю, не будет.
Для интереса, я решил открыть кран на полную и посмотреть на нашу энергию. Струя пара долетала до соседних гаражей и создавала шум взлетающей ракеты. При этом я ощутил силу реактивной тяги, пришлось даже придерживать котёл, чтобы он не начал летать по всей улице. Я был очень доволен!

В котле подобного типа запасается огромное количество энергии. Спуская пар в течение 5 секунд через отверстие дюйма, давление в котле упало всего лишь наполовину. Дело в том, что при уменьшении давления, смещается и точка кипения воды. То есть вода начинает кипеть и без подогрева, всего лишь от уменьшения давления. Этот эффект будет работать до тех пор, пока температура воды не упадёт до 100 *С. Это для нас приятная новость. Значит, можно будет долго ездить и с выключенной горелкой.
Но есть и один не совсем для меня понятный эффект. При активном выпускании пара при давлении менее 5 bar, начинает вылетать вода. Я предположил, что она кипит столь интенсивно, что в своём неистовом бурлении долетает до сухопарника и подхваченная потоком пара улетает наружу. Для эксперимента я слил часть воды, оставив уровень 20%. Эффект конечно уменьшился, но всё равно остался. Неужели вода подпрыгивает в котле на 30-40см? Если честно, с этим я пока так и не разобрался. Такая вот небольшая загадка.
Ну да ладно! Функционал готов, пора собрать наш аппарат!
Стиль
Во время конструирования нашего необычного мотоцикла, многие учёные мужи советовали мне сделать замкнутую систему воды. То есть, что бы из двигателя пар не вылетал на улицу, а попадал в конденсатор (охладитель) и получившаяся вода снова закачивалась бы в котёл с помощью маленького насоса. Это очень хорошая идея, я и сам постоянно об этом думал. Но цель нашего проекта не кругосветное путешествие на дровах, а рассмотреть технологию позапрошлого века, победить инженерный вызов и насладиться работой настоящего парового двигателя. Ну, а какой же паровой двигатель без этого легендарного чух-чух. Кроме того, хочется наблюдать вылетающий пар, он будет многое рассказывать о режимах происходящих внутри двигателя. Ну и наконец, я просто нахожу очень красивым, когда от паровоза идут клубы пара, особенно если они подсвечены солнцем. Романтика паровозов, так сказать. Но, не смотря на это всё, для образа, я решил всё-таки сделать конденсатор, что бы было видно о наших замашках, и просто для стиля.

Большинство различных самоделок имеют стиль Безумного макса или Постапокалиптического мира. Да, так проще всего. Особо то и делать ничего не нужно. Ржавые железки, приваренные гаечные ключи, немного висящих тряпок и стиль готов. Но этой простоты, или так сказать ленивого стиля в нашем мире очень много. Мне захотелось сделать что-то маленькое, милое и красивое. Сделать конфетку, так сказать. И раз уж у нас древняя паровая технология, сам собой напрашивается Стимпанк.


Стимпанк это вымышленный мир. Такой, каким он стал бы, если человечество не изобрело электричество, ДВС и прочие технологии и существовала бы только энергия пара.
Я, конечно, не дизайнер, но при сборке мотоцикла, некоторые вещи всё же пришли на ум.
Испытание парового мотоцикла
Гаражные испытания полностью готового парового мотоцикла, оснащённого котлом классической конструкции, прошли на удивление гладко. Пока я его строил, в комментариях к видеороликам, люди рекомендовали много правильных и умных вещей. По ходу дела, некоторые из них я применял и в итоге они отлично себя показали. Так, например, при прогреве двигателя паром, в нём конденсируется много воды, которая блокирует поршень и может привести к гидроудару. Люди предложили сделать маленькое отверстие с резьбой, с помощью которого можно было бы выпускать пар и сливать сконденсировавшуюся воду, тем самым быстро его прогревать. Потом, заглушить его винтиком и спокойно сразу ехать.
На удивление, самая первая попытка проехать на полностью готовом мотоцикле, прошла без каких либо проблем. Как говорится, сел и поехал. Покатавшись немного перед гаражом, я понял, что для меня этого не достаточно и я хочу больше. Разумеется, чтобы замерить все параметры, увидеть слабые места, ощутить и понять этот аппарат, нужна прямая, пустая, бесконечная трасса. Поэтому пришлось вывести мотоцикл за город и спокойненько со всем этим разобраться.

Об испытаниях:
В целом, я очень доволен результатами. Они даже превзошли мои ожидания. Видя, как ездят подобные паровые мотоциклы во всём мире, наша малютка оказалась далеко не на последнем месте.
Видео отчёт. Испытания парового мотоцикла
Заключение
Когда задумывал строить этот паровой мотоцикл, я рассуждал так: вот сделаю его, как нибудь это всё проедет и, удовлетворив все свои инженерные интересы, поставлю его дома напротив дивана в качестве эстетического элемента, навсегда. Но нет! Теперь это наоборот не даёт мне покоя. Я хочу его изучать, модернизировать, переделывать и побивать его же рекорды, хочу определить его максимум, понять всё, на что он способен! Конечно, в рамках этой концепции.
Первое с чего начну, это переделаю систему переключения пара на классическую. Мне стало интересно, какова будет разница. И ещё, при последующих испытаниях нужно будет поиграть с настройками. Добиться максимальной скорости, подобрав наиболее правильное опережение впуска пара. Ещё, хочу поэкспериментировать с разными видами топлива.
Видимо грядёт большая модернизация. Так что, если наш паровоз собирался уйти на пенсию и отсидеться где-нибудь в музее, тут я его сильно разочарую! У него впереди ещё длинное, тяжелое, но интереснейшее будущее!

 Прототип карданова подвеса
Прототип карданова подвеса
 Гироплатформа с тремя гироскопами: на
платформе установлены два гироскопа с вертикальными осями прецессии
и один с горизонтальной осью, здесь же установлены 3 акселерометра
Гироплатформа с тремя гироскопами: на
платформе установлены два гироскопа с вертикальными осями прецессии
и один с горизонтальной осью, здесь же установлены 3 акселерометра
 Пример старого свободного гироскопа с
индукционным датчиком угла
Пример старого свободного гироскопа с
индукционным датчиком угла

 На снимке захват подразделением силовиков
дрона DJI Mavic 2 Pro в Москве на митинге 10 августа 2019 году с
помощью электромагнитной пушки
На снимке захват подразделением силовиков
дрона DJI Mavic 2 Pro в Москве на митинге 10 августа 2019 году с
помощью электромагнитной пушки
 ADIS16480 со
снятой крышкой
ADIS16480 со
снятой крышкой
 Бесплатформенная инерциальная
навигационная система Миландр
Бесплатформенная инерциальная
навигационная система Миландр
 Установка 2-х инерциальных систем на
квадрокоптере при проведении сравнительных испытаний
Установка 2-х инерциальных систем на
квадрокоптере при проведении сравнительных испытаний
 Результаты испытаний одного из лётных
дней в декабре 2020-го года
Результаты испытаний одного из лётных
дней в декабре 2020-го года
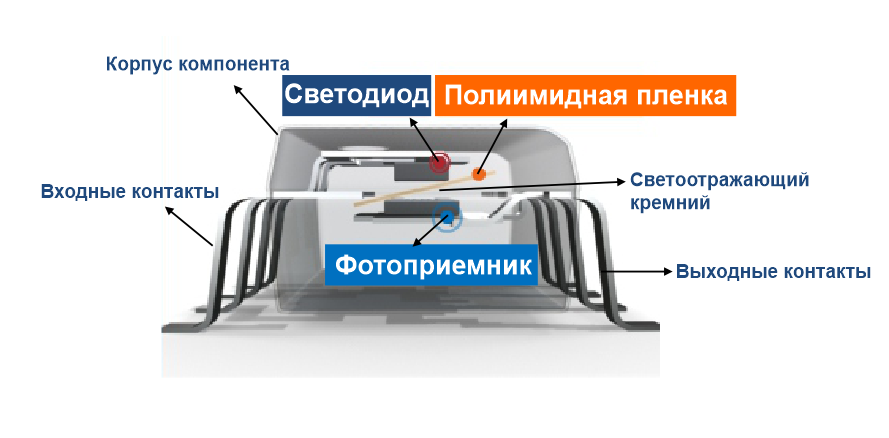
 Таблица 1. Режимы отказа IGBT и методы тестирования
Таблица 1. Режимы отказа IGBT и методы тестирования
 Рисунок 2. Схема подключения драйвера
затвора к IGBT для проведения теста на короткое замыкание
Рисунок 2. Схема подключения драйвера
затвора к IGBT для проведения теста на короткое замыкание
 Рисунок 3. Замер тока и напряжения IGBT
при проведении теста на короткое замыкание
Рисунок 3. Замер тока и напряжения IGBT
при проведении теста на короткое замыкание
 Рисунок 4. Разрушение IGBT после теста на
короткое замыкание
Рисунок 4. Разрушение IGBT после теста на
короткое замыкание Рисунок 5. Плата драйвера затвора
ACPL-337J до и после теста на короткое замыкание
Рисунок 5. Плата драйвера затвора
ACPL-337J до и после теста на короткое замыкание
 Рисунок 6. Полиимидная пленка ACPL-337J
после проведения теста на короткое замыкание
Рисунок 6. Полиимидная пленка ACPL-337J
после проведения теста на короткое замыкание
 Рисунок 7. Схема подключения драйвера
затвора к IGBT для проведения повторного теста на короткое
замыкание
Рисунок 7. Схема подключения драйвера
затвора к IGBT для проведения повторного теста на короткое
замыкание
 Рисунок 8. Полиимидная пленка ACPL-337J
после проведения повторного теста на короткое замыкание
Рисунок 8. Полиимидная пленка ACPL-337J
после проведения повторного теста на короткое замыкание
 Рисунок 9. Схема подключения драйвера
затвора к IGBT для проведения теста на воздействие постоянного тока
на оптическую развязку
Рисунок 9. Схема подключения драйвера
затвора к IGBT для проведения теста на воздействие постоянного тока
на оптическую развязку
 Рисунок 10. Скачок тока на эмиттере в
момент включения транзистора
Рисунок 10. Скачок тока на эмиттере в
момент включения транзистора
 Рисунок 11. Полиимидная пленка ACPL-337J
после проведения теста на воздействие постоянного тока высокого
значения
Рисунок 11. Полиимидная пленка ACPL-337J
после проведения теста на воздействие постоянного тока высокого
значения
 Таблица 2. Результаты испытаний на влияние
отказа IGBT на оптическую развязку подключенного драйвера затвора
Таблица 2. Результаты испытаний на влияние
отказа IGBT на оптическую развязку подключенного драйвера затвора
 Махолеты "FlapFlyer" и "Serenity" готовы к
испытаниям
Махолеты "FlapFlyer" и "Serenity" готовы к
испытаниям
 Махолет "Serenity"
Махолет "Serenity"
 Махолет "FlapFlyer"
Махолет "FlapFlyer"