Лекции по курсу Управление Техническими Системами читает Козлов Олег Степанович на кафедре Ядерные реакторы и энергетические установки факультета Энергомашиностроения МГТУ им. Н.Э. Баумана. За что ему огромная благодарность!
Данные лекции готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется. В предыдущих сериях:
1. Введение в теорию
автоматического управления.
2. Математическое описание
систем автоматического управления 2.1 2.3,2.3 2.8,2.9 2.13.
3. ЧАСТОТНЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ (РЕГУЛИРОВАНИЯ).
3.1. Амплитудно-фазовая
частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ.
3.2. Типовые звенья систем
автоматического управления (регулирования). Классификация типовых
звеньев. Простейшие типовые звенья.
3.3. Апериодическое звено 1го
порядка (инерционное звено). На примере входной камеры ядерного
реактора.
3.4. Апериодическое звено
2-го порядка.
3.5. Колебательное
звено.3.3. Апериодическое
звено 1го порядка (инерционное звено). На примере входной камеры
ядерного реактора.
3.6. Инерционно-дифференцирующее
звено.
Тем сегодняшней статьи: 3.7 Форсирующее звено (идеальное звено с введением производной)
Уравнение динамики форсирующего звена:
![y(t) = k \cdot[x(t)+\tau \cdot x'(t)] \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \mathbf{(3.7.1)}](http://personeltest.ru/aways/habrastorage.org/getpro/habr/upload_files/486/f22/86f/486f2286fa7b86b82c45856792cc47b4.svg)
Уравнение динамики в изображениях Лапласа:
![Y(s) = k \cdot [\tau\cdot s+1]\cdot X(s)\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \mathbf{(3.7.2)}](http://personeltest.ru/aways/habrastorage.org/getpro/habr/upload_files/ce5/b83/2e2/ce5b832e2c49036f144e952641a3d31e.svg)
В общем, данное звено формально можно отнести к позиционным,
т.к. или
статическая характеристика имеет вид:
или
статическая характеристика имеет вид:  .
.
Передаточная функция форсирующего звена:
![W(s) =\frac{Y(s)}{X(s)}= k \cdot [\tau \cdot s+1] =k\cdot \tau\cdot s+k \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \mathbf{(3.7.3)}](http://personeltest.ru/aways/habrastorage.org/getpro/habr/upload_files/5d1/be7/cbd/5d1be7cbd5583f0903b80a07e26219c1.svg)
 Рисунок 3.7.1 Эквивалентная структурная
схема форсирующего звена
Рисунок 3.7.1 Эквивалентная структурная
схема форсирующего звена
АФЧХ форсирующего звена, получается путем
замены 
![W(i\cdot \omega) = k \cdot[1+i\cdot \tau\cdot \omega ] = \underbrace{k}_{Re}+i\cdot\underbrace{k\cdot \tau\cdot\omega}_{Im} \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \mathbf{(3.7.4)}](http://personeltest.ru/aways/habrastorage.org/getpro/habr/upload_files/3ae/b52/51e/3aeb5251e6345db600a42c0104e51d9b.svg)
Модуль АФЧХ:


Подставляя в формулы (3.7.4) и (3.7.5) различные значениястроим соответствующие графики:
 Рисунок 3.7.2 АФЧХ форсирующего звена
Рисунок 3.7.2 АФЧХ форсирующего звена Рисунок 3.7.3 АЧХ и ФЧХ форсирующего звена
Рисунок 3.7.3 АЧХ и ФЧХ форсирующего звена
Логарифмическая амплитудная характеристика (ЛАХ):

 Рисунок 3.7.4 ЛАХ и ЛФЧХ форсирующего звена
Рисунок 3.7.4 ЛАХ и ЛФЧХ форсирующего звена
Если  звено приблизительно совпадает с идеальным усилительным звеном -
звено приблизительно совпадает с идеальным усилительным звеном -
 .
.
Если  - звено приблизительно совпадает с идеальным дифференцирующим
звеном -
- звено приблизительно совпадает с идеальным дифференцирующим
звеном -
Переходная функция:
![h(s) = L^{-1} \left[ H(s) \right] = L^{-1} \left[ \frac{W(s)}{s}\right] = L^{-1}\left[ \frac{k}{s}+\frac{k \cdot \tau \cdot s}{s}\right] = k \cdot Z^{-1}\left[\frac{1}{s}+\tau \right] \Rightarrow](http://personeltest.ru/aways/habrastorage.org/getpro/habr/upload_files/cbc/784/4e1/cbc7844e14b37801e27b6f31c45525d2.svg)

Весовая функция получается диффернцированием  по
по :
:
![w(t) = k \cdot \left[\delta(t)+ \tau\cdot \delta'(t) \right]\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \mathbf{(3.7.8)}](http://personeltest.ru/aways/habrastorage.org/getpro/habr/upload_files/5a4/cda/f8e/5a4cdaf8e94a0a468309e635bcef36e6.svg)
Построим соответствующие графики:
 Рисунок 3.7.5 Переходная функция форсирующего
звена
Рисунок 3.7.5 Переходная функция форсирующего
звена Рисунок 3.7.6 Весовая функция форсирующего звена
Рисунок 3.7.6 Весовая функция форсирующего звена
Примечание: Данное звено реализуется в ПД-регуляторах, обеспечивающих введение производных в закон управления. ПД-регулятор увеличивает быстродействие замкнутых САР, т.к. управление ведется по рассогласованию и по производной от рассогласования.
Пример
Мы уже запилили 10 лекций по УТС Управление в технических устройствах, но пока не рассмотрели ни одного примера, где было представлено собственно управление. Поскольку рассматриваемое в этой лекции звено используется в виде регулятора, разберем, наконец, в примере непосредственно модель управления техническим устройством, чтобы еще немного переместиться от теории к практической реализации.
Создадим комплексный в проект, в котором будут модель технического объекта (файл проектаnode_НS_2.prt) и модель системы управления (файлpd.prt), объединенные в пакет (файлnode_НS_2.pak)
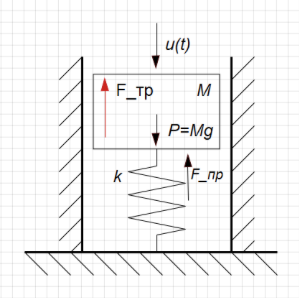
В качестве технического объекта возьмём модель камеры смешения, используемую как иллюстрацию лекции Апериодическое звено первого порядка, и добавим к модели Узел регулирования температуры (см. рис. 3.7.7)
 Рисунок 3.7.7 Модель камеры смешения с
узлом регулирования температуры
Рисунок 3.7.7 Модель камеры смешения с
узлом регулирования температуры
Узел регулирования температуры представляет собой дополнительный трубопровод с регулирующим клапаном (Valve_1 см. рис. 3.7.7). С одной стороны трубопровод подключён к узлу камеры смешения, с другой стороны задается граничное условие (ГУ) по давлению и температуре.Давление в ГУ больше давления в камере смешения, и температура то же больше чем на входе в камеру смешения.
Таким образом, при открытии клапана добавляется больше горячей воды, и температура в камере смешения растет. При закрытии клапана горячей воды подается меньше, и температура уменьшается. Так мы получаем возможность регулировать температуру.
В системе также установлен датчик температуры в узле камеры смешения. База сигналов проекта содержит два сигнала:
-
Температура в камере смешения (берется из датчика);
-
Положение клапанаValve_1.
Модель системы управления представлена на рисунке 3.7.8
 Рисунок 3.7.8 Модель системы управления
Рисунок 3.7.8 Модель системы управления
В системе управления показания датчика, полученные из базы данных, сравниваются с уставкой по температуре (с требуемой температурой). Отклонения передаются на два регулятора: один из нихпропорциональный, другой пропорционально дифференцирующий.
Настройки регуляторов взяты по умолчанию, все коэффициенты равны 1.
Модель позволяет переключаться между регуляторами с помощьюблокаключа.
Регулирующее воздействие передается c выбранного регулятора на модель привода. Это простой интегратор с ограничением диапазона0 - 100, который с заданной скоростью изменяет положения клапана, а результат предаётся в базу данных.
 Рисунок 3.7.9 Выбор типа регулятора в настройках
Рисунок 3.7.9 Выбор типа регулятора в настройках
Для демонстрации работы П и ПД регуляторов используется один и тот же готовый блок ПИД регулятор. Тип регулятора задается в свойствах блока (см. рис. 3.7.9)
 Рисунок 3.7.10. Скрипт изменения заданной
температуры
Рисунок 3.7.10. Скрипт изменения заданной
температуры
Для демонстрации режима управления в общем скрипте программы управления задается последовательное изменение требуемой температуры. (см. рис. 3.7.10)
В начальный момент времени заданная температура соответствует установившейся в системе температуре при 50% открытии клапана. На 10 секунде заданная температура меняется на 22 градуса С, на 50 секунде заданная температура меняется на 23.5 градусов С.
Чтобы можно было сравнить два варианта управления на одном графике, добавим еще один проект в пакет (файлdata.prt).
В данном файле расчетная схема содержит график, на котором выводятся текущее значение температуры (из базы данных сигналов) и значения из файла с предыдущим расчётом (temp_old.dat).
 3.7.11 Проект и скрипт для сравнения двух рассчетов
3.7.11 Проект и скрипт для сравнения двух рассчетов
Во время расчёта мы сохраняем текущее значение в файл (temp_cur.dat). По завершению расчёта (секцияfinalizationскрипта) мы копируем данные из текущего файла в сохраненный ранее с помощью глобального скрипта программы. (см. рис. 3.7.11).
Результаты моделирования представлены на рисунке 3.7.12
Зеленый график показывает изменение температуры при использовании пропорционального регулятора, красный использование пропорционально-дифференцирующего регулятора. Видно, что использование производной в ПД снижает время переходного процесса (увеличивает быстродействие), а также снижается величина перерегулирования.
 Рисунок 3.7.12 Сравнение П и ПД регуляторов
Рисунок 3.7.12 Сравнение П и ПД регуляторов
Пример для самостоятельного изучения можно взять здесь.
Предыдущая лекция из главы 3, Частотные характеристики звеньев и систем автоматического регулирования: 3.6 Инерционно-дифференцирующее звено.