
У большинства систем управления проектами есть бесплатные версии, но они бывают двух принципиально разных видов.
1) Честная бесплатная версия. Система искренне хочет, чтобы вы свободно пользовались ею без ограничений по времени. И делились с друзьями.
2) Пробная бесплатная версия. Продукт нацелен на то, чтобы сконвертировать вас в платящего клиента. И потому намеренно урезает вам жизненно важные функции. Часто это становится неприятным сюрпризом, когда начинаешь пользоваться системой.

Мы в YouGile приняли опасное для себя решение и в октябре запустили честную бесплатную версию. Сняли все ограничения, оставили только одно до 10 пользователей (оплата начиная с 11-го). Результат пока такой: сильно потеряли в количестве платящих клиентов, зато график активности в системе вырос в 2 раза за 3,5 месяца.
Конечно, предварительно мы изучили рынок и посмотрели, а какие free-версии предлагают наши конкуренты: Asana, Bitrix24, Trello и другие. Мы постоянно тестируем разные системы управления и делаем выводы: кто предлагает честную бесплатную версию, а кто нет.
В этой статье обзор 10 бесплатных систем управления проектами. Делимся наблюдениями: где какие кейсы можно решить бесплатно, а в какой момент придется доставать кошелек.
Начнем с продуктов, у которых бесплатные версии наиболее полноценные, а также расскажем про свою.
10 бесплатных систем управления
1. YouGile
До 10 человек полностью бесплатная, то есть честная облачная версия. Функционал весь на месте, тот же, что и за деньги, в рукаве ничего не прячем. По сути у нас нет бесплатного и платного тарифа как таковых маленьким командам доступно абсолютно все, всегда и бесплатно. Оплата вводится только за 11-го человека.

Что получится сделать в бесплатной версии:
Организовать сотрудников в системе: указать должности, руководителей, отделы.
Наладить работу с подрядчиками и фрилансерами: настроить права доступа в системе для своих и для чужих.
Создать проекты, доски, задачи, подзадачи.
Сортировать свои и чужие задачи в личном планировщике.
Наладить коммуникации между разными отделами. Например, передавать заказы из отдела продаж на производство.
Общаться как в мессенджере. Каждая задача это чат, также есть личные чаты. Со смайликами, цитированием, упоминаниями и всем, чем нас балуют соцсети и мессенджеры.
Смотреть, как выполняется работа доступны все виды отчетов и сводок.
Сделать для себя уютное и удобное рабочее пространство: личные доски, свой фон, приватные и избранные задачи, чек-листы, таймеры, дедлайны.
За что точно придется платить:
За пользование системой в больших командах. До 10 человек все бесплатно, за 11-го надо будет платить по 299 рублей в месяц.
За коробочную версию.
На бесплатном тарифе в YouGile можно легко работать всем отделом или маленькой командой. Создавайте сколько угодно проектов и досок, устанавливайте права для сотрудников, назначайте задачи, следите за ходом их выполнения. Помечайте важные задачи стикерами или звездочкой Избранное. Общайтесь в чатах, обсуждайте заказ пиццы (приватно) или новый проект (всей командой). Обменивайтесь файлами (без ограничений по весу). Побалуйтесь смайликами и красивыми фонами для досок.
2. Trello
Крутая бесплатная версия честная. Никаких ограничений по времени и количеству пользователей. Ограничения только по числу досок до 10 штук. И кое-где функционал урезан: не настроить права доступа, не отсортировать карточки, не экспортировать данные, не использовать больше 1 расширения для 1 доски. Раньше было лучше до продажи Trello компании Atlassian. Однако все равно считаем эту версию вполне полноценной для работы в небольших командах.

Что получится сделать в бесплатной версии:
Да собственно все, чего вы ждете от системы управления проектами. Доски, задачи, дедлайны. Сколько угодно карточек, сколько угодно списков, сколько угодно пользователей.
Можно загружать файлы, главное, чтобы не больше 10 МБ.
Хочется больше общения по задачам есть интеграция со Slack.
Легко использовать для личных целей: план действий на день, на неделю, на месяц.
Легко использовать, чтобы организовать работу в отделе или небольшой команде.
За что точно придется платить:
Больше досок. Если хотите сделать более 10 открытых досок переходите на платный тариф.
Расширения. Для каждой доски можно выбрать только 1 расширение бесплатно. Например, ставите календарь тогда карта уже недоступна. Ставите голосование и нельзя будет копировать карточки. В платной версии ограничений нет.
Тяжелые файлы. Платите, чтобы загружать в задачи 250 МБ.
Настройка прав доступа. Если нужно ограничить права пользователя в рамках доски или команды, например, при работе с фрилансерами и подрядчиками.
Приоритетная техподдержка. Ответ прилетает на почту в течение 1 дня.
Группировка и объединение досок в коллекции, чтобы не путаться в них.
Сортировка карточек. Навести порядок, упорядочить карточки по последним действиям или числу участников только в платной версии.
Шаблоны досок.
Экспорт данных.
Интеграции без ограничений: более 100 интеграций с Jira, Slack, Google Диск, InVision
Кастомные фоны для досок и пользовательские стикеры. Не самое важное в этом списке, конечно, но упомянем тоже.
Итак, в бесплатной версии Trello можно продуктивно работать, особенно в небольших командах или отделах из 10-15 человек. Надо только все продумать: не создавать лишних досок, выбирать самые важные. Не грузить тяжелые файлы, хранить их где-то отдельно и в карточках просто давать на них ссылки. Интегрировать Slack. Этого вполне хватит. Но, конечно, без расширений, экспорта данных и гибкой настройки прав доступа временами будет нелегко.
3. Bitrix24
В марте этого года Bitrix24 расширили свой бесплатный тариф сняли ограничение на количество пользователей. Раньше можно было пригласить только 12 человек, теперь сколько пожелаете. Пожалуй, отнесем эту бесплатную версию к честным. Базового функционала хватает, чтобы работать по проектам.

Что получится сделать в бесплатной версии:
Объединить сотрудников даже самой большой команды в общем рабочем пространстве.
Наладить общение в живой ленте или чатах, совершать звонки аудио и видео, обмениваться файлами.
Создавать группы, проекты, доски, ставить задачи и подзадачи, назначить исполнителей.
Смотреть отчеты.
Хранить 5 ГБ файлов в облаке.
Настроить мобильную CRM.
Интегрировать Bitrix24 с Google Drive, Dropbox, Яндекс Диск, One Drive.
Редактировать документы в режиме онлайн в GoogleDocs и MS Office Online.
За что точно придется платить:
Настройка бизнес-процессов. Если у вас много регулярных процессов, например, согласование договоров, вам будет удобнее на платном тарифе.
Создание воронки продаж. В бесплатной версии можно построить только одну общую воронку.
Сквозная аналитика.
Полноценная IP-телефония. Если планируете контролировать количество и качество звонков переходите на платный тариф. Бесплатно можно записать только 100 звонков, и места дается только 5 ГБ.
Интеграция CRM с 1C. Актуально для многих команд.
Интеграция с почтой, создание email-рассылок.
Настройка прав доступа (на всех уровнях: доступ к задачам, доступ к файлам и папкам, доступ к CRM, к телефонии).
Ряд второстепенных, но приятных функций: регулярные задачи, шаблоны проектов и задач, наблюдатели и соисполнители, учет рабочего времени.
Бесплатная версия Bitrix24 вполне подходит для работы, если у вашей команды нет особых запросов. Если вам нужна только работа с задачами спокойно оставайтесь на free-версии. Если же вы хотите построить в системе управления полноценные бизнес-процессы, создать воронки продаж, настроить сквозную аналитику, интегрироваться с 1С и почтой выбирайте платный тариф. Платных тарифов целых 5, они заточены под разные цели. Однако, на наш взгляд, Bitrix24 настолько напичкан всевозможными функциями, что встает вопрос: всегда ли они действительно нужны и легко ли их применять на практике?
4. Pyrus
Честная бесплатная версия для всех, кроме целевой аудитории. Система заточена под работу с документами, и именно на это ставит ограничение на бесплатном тарифе: до 100 задач, созданных по готовым формам. Если у вас есть такой бизнес-процесс, то вам этих 100 задач рано или поздно все равно не хватит. Рядовым же пользователям, которым нужны доски и стандартные задачи, на бесплатной версии будет комфортно.

Что получится сделать в бесплатной версии:
Пригласить любое количество сотрудников, создать любое количество простых задач, назначить исполнителей.
Связывать между собой задачи. Сортировать их по сроку и активности.
Обмениваться файлами по задачам, для их хранения дается 1 ГБ свободного места.
Вообще работать с задачами легко и приятно: есть доски, есть личный планировщик, где отображаются задачи от меня и задачи для меня. Отдельно выводятся активные, отдельно завершенные.
Есть много фишек в карточках задач: поставить на контроль, отложить на потом, настроить напоминание, повторить задачу.
Выстроить четкую структуру компании и настроить права доступа для разных отделов.
Можно считать время, затраченное каждым сотрудником на все задачи за выбранный период времени. Смотреть подробные отчеты и аналитику.
Настроить интеграцию с Google Drive, Dropbox, Box, OneDrive, а также с любой CRM.
Автоматизировать документооборот. Согласовывать договоры и платежи, оформлять заявки, работать с запросами от клиентов.
За что точно придется платить:
Формы. В системе есть удобные готовые формы, по которым можно создавать задачи и выстраивать целые бизнес-процесс. Это и является основным преимуществом системы. Но таких задач можно создать до 100 штук. Нужно больше переходите на платный тариф.
Место на диске. В платной версии его дается в 100 раз больше 100 ГБ вместо 1 ГБ.
Резервное копирование.
Приоритетная техподдержка.
Бесплатная версия системы управления Pyrus подойдет многим командам. Кроме тех, кто имеет дело с большим количеством документов и хочет автоматизировать работу с ними. В общем-то на этот сегмент платящей аудитории и ориентируется система. Еще одно самое неприятное ограничение малый размер места на диске, всего 1 ГБ.
5. Jira
Система Jira, которая чаще всего используется как баг-трекер для отдела разработки самая оплачиваемая система в России. Корпорации закупают ее примерно на 5 миллиардов рублей ежегодно. Однако у нее есть и бесплатная версия до 10 пользователей. В целом мы относим ее к честным, но все же есть серьезные ограничения: дается всего 2 ГБ места, нет расширенных прав доступа.

Что получится сделать в бесплатной версии:
Планировать работу: создавать доски, задачи, спринты, распределять их между исполнителями.
Пользоваться бизнес-шаблонами проектов (для отделов маркетинга, персонала, юридического и финансового, также есть универсальные шаблоны).
Собрать все рабочие файлы в одном месте: статусы, комментарии и вложения (дается 2 ГБ).
Расставлять приоритеты и дедлайны, контролировать ход работы над проектами.
Обсуждать задачи всей командой.
Создавать детальные отчеты о проектах, смотреть сводки, оценивать загрузку сотрудников.
Получить поддержку (правда, это не техподдержка в привычном понимании, а поддержка сообщества Jira).
За что точно придется платить:
Больше пользователей. Платные тарифы поддерживают до 10000 пользователей.
Больше места в хранилище 250 ГБ и больше.
Расширенные права доступа. Ограничить действия пользователей на уровне проектов и задач можно только в платной версии.
Анонимный доступ. Просмотр и создание задач без входа в систему. Удобно при работе с фрилансерами и подрядчиками.
Журнал событий.
В бесплатной версии могут работать маленькие команды. Главное не хранить в системе тяжелые файлы и не приглашать сторонних людей, так как их права нельзя будет ограничить. Для команд от 10 человек подходит только платная версия.
6. ClickUp
С первого взгляда кажется, что система предлагает честную бесплатную версию сколько угодно пользователей, сколько угодно задач, навсегда. Но если присмотреться внимательнее увидишь множество ограничений: отчеты, настройка прав доступа, интеграции. Ключевое ограничение: лимит в 100 действий по ряду функций. Так что мы все-таки относим ее к нечестным free-версиям.

Что получится сделать в бесплатной версии:
Приглашать любое число пользователей в проекты.
Создавать сколько угодно досок, задач и списков и организовывать работу по ним.
Использовать заметки, цифровые блокноты, напоминания и календари.
Анализировать производительность спринтов.
Отслеживать, сколько времени было затрачено на ту или иную задачу.
Смотреть по календарю, когда работа началась и закончилась.
Сортировать задачи по тегам, присваивать им любые статусы.
Получить помощь от техподдержки, круглосуточно.
За что точно придется платить:
Место в хранилище. На бесплатном тарифе дается всего 100 МБ.
Настройка прав доступа.
Гостевой доступ к проектам.
Использование готовых форм.
Отчеты.
Интеграции с Google Drive, Dropbox, OneDriveи другими хранилищами.
Приоритетная техподдержка.
За превышение лимита в 100 действий по ряду функций, ценных для любой системы управления проектами: настройка полей в карточках, использование dashboard, timeline, mind-map и диаграмм Гантта и так далее.
Главная проблема на бесплатном тарифе рано или поздно упираешься в потолок, когда исчерпаешь свой лимит на 100 действий по множеству функций, и система просто помашет тебе ручкой. И волей-неволей захочешь перейти на платный тариф.
7. Wrike
Возможности бесплатной версии сильно ограничены, и прежде всего количеством пользователей до 5 человек. Еще несколько ключевых ограничений: нельзя настроить права доступа, нельзя оценить загрузку и успеваемость сотрудников. По нашему субъективному мнению это нечестная бесплатная версия, то есть пробная.

Что получится сделать в бесплатной версии:
Все стандартно: сделать проекты и доски, повесить задачи, назначить исполнителей.
Задачи можно ставить как на доски, так и в личный планировщик. Можно их сортировать по дате, приоритету, статусу, важности.
Удобно хранить файлы и документы. Документы даже можно редактировать в режиме онлайн.
Общаться с коллегами в Ленте событий.
Интегрировать систему с Google Диск, Dropbox, Box, MSFT Office 365 и OneDrive.
Использовать в своих целях 2 ГБ места.
За что точно придется платить:
Отчеты. В платной версии можно создать свои шаблоны отчетов, подписаться на уведомления, отобразить наглядно все важные данные по проекту в виде графиков и диаграмм.
Любимая многими диаграмма Гантта тоже доступна только на платном тарифе.
Контроль загрузки сотрудников: кто что выполнил, в какие сроки. Есть индекс эффективности и учет рабочего времени.
Права доступа. Сгруппировать сотрудников по командам (отдел маркетинга, бухгалтерия и т.д.), каждой команде назначить права это стоит денег. Как и приглашение гостевых пользователей клиентов, подрядчиков, фрилансеров.
Даже такая мелочь, как календарь только в платной версии.
Основные ограничения бесплатной версии: нет отчетов, нет настройки прав доступа, нет визуализации процессов и контроля загрузки сотрудников. Подходит только для маленьких отделов, где 5 человек. А для личного пользования лучше использовать более простые и интуитивно понятные бесплатные системы управления, такие как Trello. Однако эта free-версия позволяет познакомиться с Wrike и принять решение, подходит вам эта система или нет.
8. Asana
Есть бесплатная версия до 15 пользователей, но ее функционал сильно урезан: нет отчетов, нет возможности контролировать выполнение задач, нельзя следить за обновлениями. Шаг влево, шаг вправо и ты проваливаешься в Активируйте Asana Premium!. Относим ее к нечестным.

Что получится сделать в бесплатной версии:
Создать сколько угодно проектов с высоким уровнем декомпозиции на основе шаблонов.
Организовать работу над проектами: создать доски, поставить задачи, назначить исполнителей.
Классифицировать задачи при помощи тегов.
Начать общение в карточках задач и общей новостной ленте.
Настроить для себя личный планировщик: сортировать задачи по сроку их выполнения, делать приватные задачи.
За что точно придется платить:
Отчеты. Вы не сможете посмотреть отчет даже про проектам или исполнителям.
Контроль выполнения задач, просмотр незавершенных и просроченных. Придется верить людям на слово, что все задачи выполняются в срок.
Возможность следить за новыми задачами, обновлениями и статусами важных проектов.
Визуализация процессов и создание связей между задачами. Timeline недоступен.
Работа с задачами, которые вы создали и поручили коллегам. Их даже нельзя вывести отдельно.
Работа с формами.
Без отчетов, форм, визуализации процессов, чужих задач, списка обновлений и контроля сроков работать в системе управления практически невозможно. Asana хочет, чтобы вы стали платящим клиентом, и потому забирает у вас половину функций. Бесплатная версия нужна только для знакомства подглядеть, что происходит внутри.
9. Worksection
Бесплатная версия очень условная, нечестная: до 2 активных проектов, до 5 пользователей, до 100 МБ на диске. Складывается ощущение, что ее добавили просто как формальность, для галочки. Однако она помогает познакомиться с системой управления тем, кто планирует работать на платном тарифе.
Подробнее о тарифах Worksection

Что получится сделать в бесплатной версии:
Создать всего 2 рабочих проекта. Пригласить до 5 пользователей.
Поизучать систему изнутри: попробовать создать задачу, пообсуждать ее, прикрепить файл.
Возможно, free-версию можно использовать для личных нужд, хотя для этого есть более удобные бесплатные системы управления проектами, тот же Trello.
За что точно придется платить:
Добавление более 2 проектов, задачи и подзадачи, возможность обозначать сроки выполнения, приоритеты, исполнителей, метки, статусы
Ежедневный дайджест, приходящий на email.
Групповые чаты и обмен файлами более 100 МБ.
Диаграмма Гантта.
Функция учета времени, тайм-трекер. Которая помогает посчитать затраты по времени и бюджетам.
Отчеты.
Настройка прав доступа, ограничение прав для клиентов и партнеров.
Бесплатную версию этой системы имеет смысл рассматривать только в том случае, в дальнейшем вы планируете перейти на платный тариф.
10. ToDoist
Бесплатная версия этой системы управления категорически нечестная: до 5 пользователей и до 80 проектов (хотя по сравнению с 2 проектами в Worksection это уже ого-го). Но радоваться рано. Все остальные возможности урезаны практически до нуля. Нельзя добавить более 150 задач, нельзя писать комментарии, нельзя загружать файлы...

Что получится сделать в бесплатной версии:
Разместить 150 задач.
Подсмотреть, как устроена система изнутри, познакомиться с ней.
За что точно придется платить:
Большее число пользователей и проектов.
Более 150 активных задач.
Напоминания.
Комментарии.
Загрузка файлов.
Метки для карточек и их классификации.
Фильтры для поиска задач.
Визуализация продуктивности: цели на день и неделю, личный прогресс каждого пользователя.
Разные права для админа и для участника.
Формирование задач из писем в ящике Gmail.
Шаблоны проектов.
Лента событий.
Просмотр видео и прослушивание аудио в самой системе.
По факту бесплатной версии у этого сервиса нет. Да, вы можете создать 80 проектов и сделать целых 150 задач, но какой в этом смысл, если нельзя даже оставить комментарий? Не говоря уже об обмене файлами, напоминаниях, метках и прочих must-have атрибутах любой системы управления. Free-версия здесь только для знакомства.
Сравнение 10 бесплатных систем управления
Подведем итоги. Как вы уже поняли, сам этот обзор 10 версий бесплатных систем управления субъективный. В таблице ниже только объективные данные и цифры.

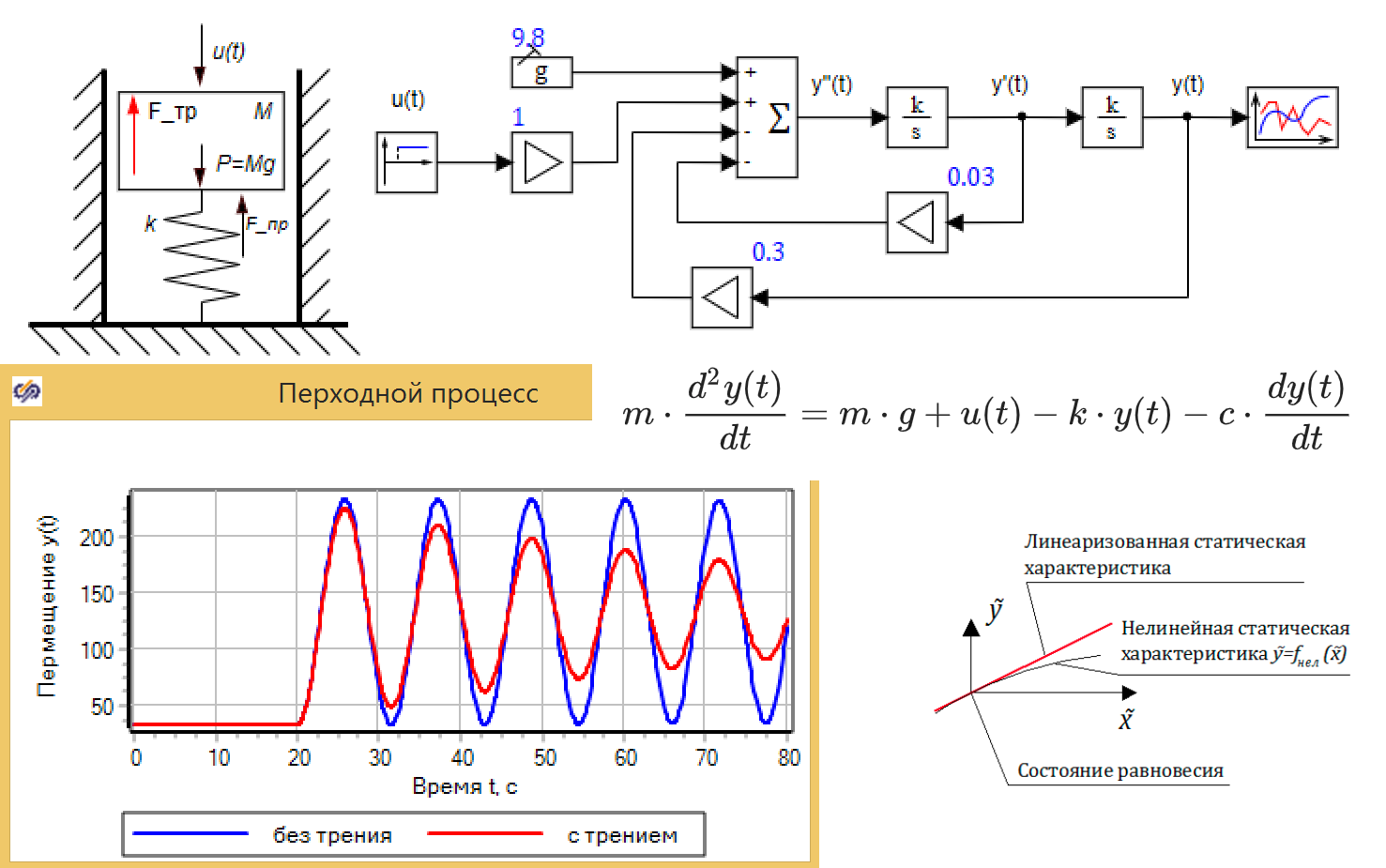


 стационарные значения входного и
выходного воздействий;
стационарные значения входного и
выходного воздействий; отклонения от
станционара, соотвесвенно.
отклонения от
станционара, соотвесвенно.


 сила тяжести;
сила тяжести;  сила сопротивления пружины,
сила сопротивления пружины,
 сила вязконо
трения (пропорциональна скорости поршеня)
сила вязконо
трения (пропорциональна скорости поршеня)![$m \cdot g \Rightarrow [\frac{кг \cdot м}{ с^2}]; c \Rightarrow [\frac{кг}{с}]; k \Rightarrow [\frac{кг}{с^2}]$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/be3/024/3ff/be30243fffad7bd3f863a0e69102ec01.svg)
![$\left[ \begin{gathered} y(t) =y_0 + \Delta y(t); u(t) = u_0 + \Delta u(t);\\ y'(t) = [\Delta y(t)]; y''(t) =[\Delta y(t)]'\\ \end{gathered} \right.$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/242/d30/f71/242d30f71e3fc2797fa8226da7abf184.svg) . Тогда, подставляя эти соотношения в уравнение
(2.1.2), получаем:
. Тогда, подставляя эти соотношения в уравнение
(2.1.2), получаем:
 , то уравнение принимает вид:
, то уравнение принимает вид:
![$y_0 = \frac{1}{k} \cdot[u_0+m \cdot g] \ \ \ \mathbf{(2.1.5)}$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/873/bd9/f9a/873bd9f9af9baec7c9c174fca98e7e56.svg)




![$T_1 = \frac{c}{k} \Rightarrow [\frac{кг \cdot c^2}{c \cdot кг}] = [c]$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/138/d34/4b4/138d344b43a0221bb7e9d6854d61016a.svg)
![$T_2^2 = \frac{m}{k} \Rightarrow [\frac{кг \cdot c^2}{kg}] =[c^2]$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/67f/a6d/b07/67fa6db07294f485284dc596ee928c27.svg)
 ];
]; ): [
): [ ].
]. , что эквивалентно
, что эквивалентно

 оператор
диффренцирования;
оператор
диффренцирования; -линейный дифференциальный оператор;
-линейный дифференциальный оператор; 
 линейный дифференциальный оператор,
вырожденный в константу, равную
линейный дифференциальный оператор,
вырожденный в константу, равную ![$\left[ \begin{gathered} \widetilde y(t) = \frac {y(t)-y_0}{y_0} = \frac {\Delta y(t)}{y_0}\\ \widetilde u(t) = \frac {u(t)-u_0}{u_0} =\frac {\Delta u(t)}{u_0}\\ \end{gathered} \right. \Rightarrow \left[ \begin{gathered} y(t) =y_0 \cdot [1+ \widetilde y(t)]\\ u(t) = u_0 \cdot [1+ \widetilde u(t)]\\ \end{gathered} \right. \Rightarrow \left[ \begin{gathered} y'(t) =y_0 \cdot \widetilde y(t)\\ y''(t) = y_0 \cdot \widetilde y(t)''\\ \end{gathered} \right. $](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/c1a/e87/3a3/c1ae873a3902961410194a2b5ff7a1ca.svg)
![$m \cdot y_0 \cdot \frac{d^2 \widetilde y(t)}{dt^2} = m \cdot g +u_0 \cdot[1+\widetilde u(t)] -k \cdot y_0 \cdot[1+\widetilde y(t)] - c \cdot y_0 \cdot \frac{d \widetilde y(t)}{dt}; или$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/292/703/d26/292703d26145ca547c794da8a5995749.svg)

 , и, разделив на
, и, разделив на
 , получаем:
, получаем:


 коэффициент усиления, причем безразмерный.
коэффициент усиления, причем безразмерный.
![$\left[\frac{кг \cdot м}{с^2} \cdot \frac{c^2}{кг} \cdot \frac{1}{м}\right] =[1].$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/1e4/605/2c2/1e46052c2f0793606b50d66a69a2b14e.svg)


 дифференциальные
операторы.
дифференциальные
операторы. , то уравнение динамики нелинейное. Под
нелинейными действиями понимаются все математические действия,
кроме сложения (+) и вычитания (-).
, то уравнение динамики нелинейное. Под
нелинейными действиями понимаются все математические действия,
кроме сложения (+) и вычитания (-).

 в левую часть уравнения и
запишем уравнение в виде%
в левую часть уравнения и
запишем уравнение в виде%
 - функция регулируемой переменной и ее
производных, а также управляющего (входного) воздействия и его
производных, причем F обычно нелинейная функция.
- функция регулируемой переменной и ее
производных, а также управляющего (входного) воздействия и его
производных, причем F обычно нелинейная функция.
 .
. , то простое разложение функции
в ряд Тейлора в окрестности точки
, то простое разложение функции
в ряд Тейлора в окрестности точки  будет выглядеть так:
будет выглядеть так:

 ), оставим в разложении только члены первого
порядка малости (линейные). Поскольку
), оставим в разложении только члены первого
порядка малости (линейные). Поскольку ![$[y(t)-y_0] \equiv \Delta y(t); y'(t) = [y_0+\Delta y(t)]' = (\Delta y(t))'$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/334/275/576/33427557641c70f133c127bc51e8bf30.svg) , получаем:
, получаем:


 постоянные коэффициенты,
поэтому уравнения 2.2.5 линейное дифференциальное с постоянными
коэффициентами.
постоянные коэффициенты,
поэтому уравнения 2.2.5 линейное дифференциальное с постоянными
коэффициентами.
 оператор дифференцирования;
оператор дифференцирования;
 и выполнив некоторые
преобразования, получаем:
и выполнив некоторые
преобразования, получаем:
 за общую скобку и разделить все
уравнение на
за общую скобку и разделить все
уравнение на  , то уравнение принимает вид:
, то уравнение принимает вид:![$a_n \cdot \tilde{y}^{(n)} +a_{(n-1)}\cdot \tilde{y}^{(n-1)} +..+a_1\cdot \tilde{y}'+\tilde{y} = \\ =k \cdot [b_m \cdot \tilde{u}^{(m)} +b_{(m-1)} \cdot \tilde{u}^{(m-1)} +..+b_1 \cdot \tilde{u}'+ \tilde{u}] \ \ \ \mathbf{(2.2.8)}$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/0b5/0a8/c03/0b50a8c034572a682111df44af6b4690.svg)


![$a_3^0 \cdot y'''(t) +a_2^0 \cdot y''(t)+a_1^0 \cdot y'(t) \cdot[y(t)-d]+ a_2^0 \cdot y^2(t)=b_1^0 \cdot x'(t) +b_0^0 \cdot x(t); $](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/580/32e/3dc/58032e3dc4c444269f34ab9e1febc845.svg)


![$a_1^0 \cdot y'(t) \cdot[y(t)-d]$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/aa2/ea0/93c/aa2ea093c6e0510a9185ed4dbeecfd73.svg) чисто
нелинейное, так как действие умножения является нелинейным.
чисто
нелинейное, так как действие умножения является нелинейным.![$\tilde{y}(t) = \frac{y(t) - y_0}{y_0};\ \Rightarrow y(t) = y_0 \cdot [1+ \tilde{y}(t)]; \\ \tilde{x}(t) = \frac{x(t) - x_0}{x_0};\ \Rightarrow x(t) = x_0 \cdot [1+ \tilde{x}(t)].$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/359/62b/a8e/35962ba8e1683c8a1d94006cc83521e2.svg)
 .
.![$ a_3^0 \cdot y_0 \cdot \tilde y'''(t) +a_2^0 \cdot y_0 \cdot \tilde y''(t)+a_1^0 \cdot y_0 \cdot \tilde y'(t) \cdot[y_0+y_0 \cdot \tilde y(t) -d]+a_0^0 \cdot y_0^2 \cdot[1+ \tilde y(t)]^2 = \\ = b_1^0 \cdot x_0 \cdot \tilde x'(t) + b_0^0 \cdot х_0 \cdot[1+\tilde x(t)]; \ \Rightarrow \ раскрыв \ скобки \Rightarrow \\ a_3^0 \cdot y_0 \cdot \tilde y'''(t)+a_2^0 \cdot y_0 \cdot \tilde y''(t)+a_1^0 \cdot y_0^2 \cdot \tilde y'(t) + a_1^0 \cdot y_0^2 \cdot \tilde y'(t) \cdot \tilde y(t)-a_1^0 \cdot y_0 \cdot \tilde y'(t) \cdot d + \\ +a_0^0 \cdot y_0^2 +2 \cdot a_0^0 \cdot y_0^2 \cdot\tilde y(t) +a_0^0 \cdot y_0^2 \cdot\tilde y(t)^2 = b_1^0 \cdot x_0 \cdot \tilde x'(t) + b_0^0 \cdot х_0+ b_0^0 \cdot х_0 \cdot \tilde x(t)];$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/e83/acd/4e8/e83acd4e8c4a8676fc4ebb55ddefae23.svg)
 , а
так же пренебрегая слагаемыми второго прядка малости:
, а
так же пренебрегая слагаемыми второго прядка малости:  , получаем следующее уравнение:
, получаем следующее уравнение:


![$a_3 \cdot \tilde y'''(t)+a_2 \cdot \tilde y''(t)+a_1 \cdot \tilde y'(t)+ \tilde y(t) = k \cdot[ b_1 \cdot \tilde x'(t) + \tilde x(t)]$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/b7c/ccd/ef6/b7cccdef6c7eacfe9a7eaa50150e01aa.svg)





 решение однородного
дифференциального уравнения
решение однородного
дифференциального уравнения  y_{част.}(t) $inline$ -
частное решение. $inline$
y_{част.}(t) $inline$ -
частное решение. $inline$ , собственным
решением, так как его решение не зависит от входного
воздействия, а полностью определяется собственными
динамическими свойствами САУ (звена).
, собственным
решением, так как его решение не зависит от входного
воздействия, а полностью определяется собственными
динамическими свойствами САУ (звена). , поэтому САУ (САР или звено)
вынуждена отрабатывать это воздействие:
, поэтому САУ (САР или звено)
вынуждена отрабатывать это воздействие:
 , то сначала
решаем однородное дифференциальное уравнение:
, то сначала
решаем однородное дифференциальное уравнение:



![$y_{собств.}(t)=\sum_{j=1}^{n-2} C_j \cdot e^{\lambda_{j} \cdot t} +C_{n-1} \cdot e^{\lambda_{n-1} \cdot t}\cdot [1+C_n\cdot t]. \ \ \ \mathbf{(2.3.7)}$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/b59/8c4/392/b598c43924d0d0899a583d0fc92b251b.svg)
![$y_{собств.}(t)=\sum_{j=1}^{n-k} C_j \cdot e^{\lambda_{j} \cdot t} +C_{n+1-k} \cdot e^{\lambda_{n+1-k} \cdot t}\cdot [1+C_{n+2-k}\cdot t+C_{n+3-k}\cdot t^2+.. \\ ..+C_{n}\cdot t^{k-1}]. \ \ \ \mathbf{(2.3.8)}$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/22a/f6a/6f7/22af6a6f70ce098766219fe5db5bafdd.svg)
 .
.
 .
. 

 ; Решая, имеем:
; Решая, имеем:  тогда:
тогда:
 неизвестные (пока) постоянные
интегрирования.
неизвестные (пока) постоянные
интегрирования. как:
как:

 , имеем:
, имеем: 
 , а из 2-го начального
условия имеем:
, а из 2-го начального
условия имеем: 
 и
и  , имеем:
, имеем: 









 для вычисления силы, которую
создаёт i-ая ВМГ в соответствующем направлении, а mi|x,y,z
коэффициент перед
для вычисления силы, которую
создаёт i-ая ВМГ в соответствующем направлении, а mi|x,y,z
коэффициент перед  будет еще одно слагаемое.
будет еще одно слагаемое. . Нам же нужно
получить обратное решение зависимость угловой скорости i-ого
двигателя от поданного управляющего воздействия по какому-либо из
каналов управления. В общем виде эта задача имеет бесконечное
множество решений, однако среди этого бесконечного множества можно
выделить по тому или иному критерию или способу оптимальное
решение.
. Нам же нужно
получить обратное решение зависимость угловой скорости i-ого
двигателя от поданного управляющего воздействия по какому-либо из
каналов управления. В общем виде эта задача имеет бесконечное
множество решений, однако среди этого бесконечного множества можно
выделить по тому или иному критерию или способу оптимальное
решение.
 , которая вычисляется как:
$inline$А^+= Г^Т (Г \cdot Г^Т)^{-1}$inline$. Она же и является
оптимальным решением поставленной задачи с наложенными
ограничениями на решение.
, которая вычисляется как:
$inline$А^+= Г^Т (Г \cdot Г^Т)^{-1}$inline$. Она же и является
оптимальным решением поставленной задачи с наложенными
ограничениями на решение.



 и
и  угол наклона должен быть нулевым,
угловая скорость должна быть нулевой, и приложенный момент сил тоже
должен быть нулевым. Регулятор ориентации должен быть достаточно
быстродействующим чтобы успевать парировать внешние возмущающие
моменты и не давать коптеру сильно отклоняться от нулевой позиции,
т.к. любой наклон коптера приводит к уменьшению вертикальной
составляющей силы тяги и к уводу коптера в соответствующую сторону
вбок.
угол наклона должен быть нулевым,
угловая скорость должна быть нулевой, и приложенный момент сил тоже
должен быть нулевым. Регулятор ориентации должен быть достаточно
быстродействующим чтобы успевать парировать внешние возмущающие
моменты и не давать коптеру сильно отклоняться от нулевой позиции,
т.к. любой наклон коптера приводит к уменьшению вертикальной
составляющей силы тяги и к уводу коптера в соответствующую сторону
вбок.








 и
и  рассогласования заданных
значений координат и измеренных в инерциальной системе отсчета, а
выражения под арксинусом дополнительно ограничиваются некоторой
величиной (полученной исходя из запасов управляемости коптера по
крену и тангажу), например, диапазоном
рассогласования заданных
значений координат и измеренных в инерциальной системе отсчета, а
выражения под арксинусом дополнительно ограничиваются некоторой
величиной (полученной исходя из запасов управляемости коптера по
крену и тангажу), например, диапазоном ![$\left[ -\frac{\pi}{16};+\frac{\pi}{16}\right]$](http://personeltest.ru/aways/habrastorage.org/getpro/habr/formulas/2dd/42b/04d/2dd42b04dda43201d1945f6845a9677b.svg) .
.