Вот уж несколько лет, как я увлёкся
микроконтроллерами, а именно семейством AVR. Ещё на этапе освоения
Ардуино (в этот момент часть аудитории поплевались и ушли читать
другие статьи) я пытался выдавить из неё больше, чем задумано. Меня
всегда больше интересовали нестандартные решения обычных задач.
Сейчас я знаю об AVR намного больше, чем ещё пару лет назад, и всё
больше убеждаюсь, что знаю очень мало.

С чего начинает среднестатистический начинающий электронщик?
Правильно, с часов! Как только научился пользоваться голыми
контроллерами, а не платами Ардуино, захотел сделать часы на
Атмеге, голой Атмеге без кучи ключей и буферных микросхем. И
обязательно со статической индикацией, а не с динамической (ну не
люблю я её). Собственно, статическая индикация программно гораздо
проще, а ведь мы простых путей не ищем. Но зато возникают другие
проблемы, которые несколько раз меня останавливали в самом начале
пути. Понятно, что если взять Атмегу пожирней, задействовать в ней
половину ножек и полпроцента памяти, задача упрощается донельзя,
собственно, такие настольные часы на ATmega128 работают у меня на
столе пару лет.

Но это не наш метод. Я с самого начала хотел именно ATmega8, как
самую доступную и самую дешёвую (в том числе в дип-корпусе). Всё то
же самое можно и на ATmega48, но её попробуй ещё найди, разве что у
Вас в ящике стола валяется их много с незапамятных времён.
Посмотрим на картинку, известную всем, кто недавно интересуется
AVR.

Глядя на неё, легко посчитать, что мы можем задействовать на
часовой индикатор 20 ножек, ещё на двух у нас будет кварц (куда от
него денешься, внутреннее тактирование не прокатит, нам ведь от
часов нужна точность какая-никакая). Ну и сброс. На четыре
семисегментных индикатора нужно 28 ног, ну даже 27, ведь десятки
часов можно отображать цифрами 1 и 2, а ноль не отображать. Ещё
когда идея только зарождалась, я это количество сократил до 22
ножек, ведь для отображения десятков часов можно обойтись цифрой 1,
и оба её сегмента зажигать от одной ноги контроллера. Но как ни
крути, пары ног мне всё же не хватало, даже при том что я давно
знал о возможности использования как ввода-вывода ножки Reset, но
так ещё ни разу и не попробовал (если не считать ATtiny13, её не
так жалко было), ведь параллельного программатора у меня нет, а
любая отладка это минимум несколько итераций прошивки, вряд ли всё
идеально выйдет с первого раза. Так и лежал этот замысел в закромах
мозга, и ждал своего времени, пока как-то мне не пришла в голову
ещё одна интересная идея.
Посмотрел я однажды на светодиодную ленту (120 светодиодов на метр)
и понял, что можно легко и просто сделать электронные часы любого
размера с её использованием. Просто нарезаем сегменты желаемой
длины и наклеиваем их на подходящее основание, для больших размеров
сегмент может складываться из двух и более лент по ширине. В моём
случае отрезаем сегменты по шесть светиков, таким образом длина
сегмента составляет 50 мм, высота цифры 100, для моей задумки
офисных часов вполне достаточно.

Но вот незадача, напряжение питания ленты 12 вольт, а AVR хочет не
больше 5 вольт (люди утверждают, что и 8 вольт выдерживают, но я
проверять пока не буду, да и не поможет). То есть нужно ставить 22
ключа для включения всех сегментов. Если применить драйвер ULN2003,
хватит (почти) трёх штук, это копейки, но, как я писал выше, это не
наш метод, хотя этот вариант можно приберечь для часов побольше. Ну
никак это не вписывается в концепцию голая Атмега.
И вот тут-то начинается самое интересное. Напряжение питания ленты
12 вольт, первые признаки жизни белые светодиоды (три штуки
последовательно) начинают подавать при более чем 7.5 вольт, и, что
очень важно, до этого напряжения ток через ленту практически равен
нулю (можете проверить). На ножке контроллера, работающей в режиме
выхода, может быть уровень 0 вольт или 5 вольт (третий вариант
рассмотрим позже), и если подключить сегмент анодом к +12 вольт, а
катодом к выходу контроллера, напряжение на сегменте будет
равняться соответственно 12 вольт (светит) или 7 вольт (не светит).
Даже если бы через погасший сегмент протекал мизерный ток, он ушёл
бы к плюсу питания контроллера через защитный диод, которые в AVR
гораздо более выносливые, чем нас пугали в обучающих статьях.
Третий вариант ножка в режиме входа, напряжение на сегменте 7 вольт
благодаря защитному диоду, стало быть сегмент не светит. Конечно,
как только я обдумал всё это в теории, сразу же проверил на
практике, залив в контроллер простой блинк для одной из ног.

А так как сейчас в силу некоторых обстоятельств мои возможности для
экспериментов слегка ограничены, напряжение питания для сегмента
случайно оказалось более 18 вольт, и сегмент гас не полностью, так
что я успел разочаровано подумать, что подпалил выход. Когда
уменьшил напряжение (на тот момент даже нечем было померить), всё
стало на свои места, так что, благодаря нелепой случайности, теперь
я точно знаю, что для схемы не смертельно небольшое повышение
напряжения выше 12 вольт. С напряжением определились, а что с
током? На моей ленте (и скорей всего на вашей тоже) стоят резисторы
по 150 ом, ток через сегмент не более 20 мА, только сегмент в
данном случае это три светика, а каждый сегмент моих часов состоят
из двух сегментов ленты, так что 40 мА. Вроде даже вписываемся в
даташит, но на 20 выходов это уже 800 мА, что намного выше
дозволенных 200 мА на корпус. Ток через ленту очень зависит от
напряжения на ней, и нелинейно падает даже при небольшом снижении,
что является большим минусом при обычном использовании ленты, и
плюсом в данном случае, ведь реальное напряжение на сегментах равно
12 вольт минус падение на ключе (около 0.6 вольт), а ещё при
желании можно снизить напряжение питания, понизив тем самым яркость
часов. Так что страшные 800 мА несложно снизить раза в два. В любом
случае, я был уверен, что это не станет проблемой, да и
приобретённый опыт ценнее, чем возможность потери одной Атмеги. Вот
так просто ATmega8 коммутирует индикатор с напряжением в два с
лишним раза выше, чем её собственное напряжение питания. Именно это
я имел ввиду в заголовке статьи. Хотя способ совсем не нов, по
такому же принципу работает советская микросхема К155ИД1
высоковольтный дешифратор управления газоразрядными индикаторами,
где сравнительно низковольтные выходы (до 60 вольт) коммутировали
индикаторы с напряжением зажигания 150 вольт и выше.

Дальнейшие эксперименты я продолжил с обычным четырёхсимвольным
семисегментным индикатором с общими анодами и раздельными катодами,
как раз припасён был для такого случая.

Аноды к +5 вольт через один на всех резистор, для отладки прошивки
этого за глаза. Первоначально я остановился на варианте
использования в качестве двух недостающих ног пинов подключения
кварца (итого 22 выхода), а тактировать контроллер от внешнего
генератора минутных импульсов через (внимание!)

вход сброса. Это ещё один занимательный лайфхак, который описан
здесь
Как сохранять переменные
arduino, при reset
Можете попробовать залить в Ардуино простой код и посмотреть
результат работы в Мониторе порта, периодически сбрасывая её
кнопкой или с клавиатуры:
пробник
#define NO_INIT __attribute__((section(".noinit")))void setup() { static unsigned NO_INIT nonInitCounter; nonInitCounter=nonInitCounter+2048; Serial.begin(9600); Serial.print("Setup counter: "); Serial.println(nonInitCounter);}void loop(){}
Не буду приводить свой код, дабы не подвергаться критике лишний раз
(я не самый лучший
программист), но если в двух словах, можно создать глобальную
переменную, которая сохраняется при перезагрузке контроллера. Раз в
минуту под воздействием внешнего импульса сброса Атмега
перезагружается, и начинает заново отрабатывать прошивку: считывает
переменную, преобразует её в показания часов и минут, выводит на
индикатор, увеличивает переменную на одну минуту. Дальше опять
сброс, и всё по-новой. Пришлось порыться в интернете и опробовать
два вида программного сброса, ведь внешнего генератора у меня пока
не было, а жмакать сброс всё время вручную не сильно удобно.
пример функции
void softReset() { //программный сброс //http://kazus.ru/forums/showthread.php?t=13540&page=3# asm volatile ("rjmp 0x0000");//Sketch uses 2412 bytes //программный сброс //https://www.cyberforum.ru/post11307314.html //((void(*)(void))0)();//Sketch uses 2416 bytes}
Что интересно, эта переменная может сохраняться даже после
отключения питания (не всегда). И это не EEPROM, если кто подумал.
По мере отладки я пришёл к использованию нескольких таких
переменных.
Кто-то скажет: какой внешний генератор, а как же концепция голой
Атмеги? На момент опытов я был уверен, что в качестве генератора
выступит некая козявка размером с рисинку и ценой в пару копеек. Но
когда всё заработало в теории и пришло время с козявкой
определиться, меня ждал облом. Единственное, что меня могло бы
устроить, это старая добрая К176ИЕ12, кто бы мог подумать! На дворе
двадцать первый век, а в природе нет простого доступного
аппаратного генератора минутных импульсов.
Не беда, подумал я. Можно и раз в секунду. Немного переписал код,
проверил работу, отлично. Но опять же, для внешнего генератора я
нашёл только DS1307 (и её аналоги). Да, стоит копейки, для обвязки
достаточно кварца (и ещё несколько необязательных элементов). Вот
только чтобы она генерировала секундные импульсы, ей нужно подать
команду по шине I2C. Чем подать? И какую? (Теперь я уже знаю, но на
тот момент не было с чем пробовать). Короче, не подходит. Ладно,
последняя надежда. Некоторые западные часы 90-х тактировались
частотой сети 50 гц. Возможно, сейчас у нас частота стабильней, чем
была 30 лет назад. Попробовал сымитировать работает. Если бы
воплотил в жизнь, было бы оригинально контроллер, перезагружающийся
100 раз в секунду. Но я пока отмёл этот вариант и стал искать
другие.
Итак, я мог использовать 22 выхода (что мне достаточно) и пин
сброса в качестве входа. Но не срослось Вернёмся к варианту с
кварцем. Минус две ноги на кварц получаем 20, даже если ножку
сброса сделать портом ввода-вывода, получим 21, всё равно не
хватает одного, хоть ты тресни! Но недавно я нашёл способ, о
котором задумывался ещё два года назад, что-то не получилось тогда.
У нас есть пин AREF для опорного напряжения, относительно которого
происходят аналоговые измерения. И на этот пин мы можем программно
подать напряжение питания в качестве опорного или встроенное
опорное напряжение 2.56 (для ATmega8). Проверил, измерил,
действительно можно получить на ножке AREF напряжение 0 вольт, 2.56
вольт, или 5 вольт.
превращаем AREF в ещё один выход
// превращаем AREF в ещё один выходvoid setup() {}void loop() { ADMUX = 7 + 64; // уровень 1 (5 вольт) // 7-номер аналогового входа//почему 7 аналоговый вход? А потому что физически у Атмеги входы от 0 до 5,//и назначение аналоговым входом входа 7 не помешает работе остальных в качестве выходов delay(3000); ADMUX = 7 + 64 + 128; // уровень 2.56 вольт // 7-номер аналогового входа delay(3000); ADMUX = 7; // уровень 0 delay(3000);}
Нюанс: это если замерять относительно общего провода. Если мерить
относительно +5 вольт, во всех трёх случаях получаем ноль. То есть
нагрузку можно подключить между AREF и общим. Экспериментально
установил, что можно получить ток до 20 мА при 2.56 вольт на ноге и
до 40 мА при 5 вольт на ноге, этого вполне достаточно, чтоб зажечь
светодиод, к примеру. Вот он, заветный двадцать второй выход!
Конечно, напрямую управлять двенадцативольтовым сегментом не
получится, нужен транзистор. Под руку попался легендарный КТ315,
сколько лет я к нему не прикасался, как по мне, это одно из лучших
произведений советской электроники, наряду с микрухой К155ЛА3.
Когда-то я КТ315 и КТ361 даже в качестве ключей импульсного
трансформатора питания применял, при напряжении порядка 60 вольт, и
неоднократно. Здесь же нагрузка для него плёвая, и я принципиально
даже резистор в базу не поставлю (20 мА вполне себе допустимый ток
базы).
Ну что ж, думал я, 22 выхода есть, отлажу код с 21 выходом, а 22-й
на ножке сброса оставлю напоследок, когда всё остальное уже
заработало. Ещё ведь и кнопки установки времени нужно куда-то
приткнуть, а ног не осталось вовсе. Если б Атмега была в
SMD-корпусе, можно было бы воспользоваться входами А6 и А7,
выходами они всё равно не умеют. Но у меня корпус DIP, так что
такой роскоши позволить себе не могу. Зато ведь можно выходы
сделать входами, правда, в это время придётся погасить индикацию,
но для опроса кнопок достаточно нескольких миллисекунд, никто и не
заметит (как я ошибался!). Значит, перевожу ножки кнопок в режим
входов, подтягиваем программно к питанию, и ждём пару миллисекунд.
Если в это время какая-то из кнопок замкнута на минус, ждём ещё 20
миллисекунд, убеждаемся, что кнопка всё ещё нажата, и производим
соответствующее действие в программе. Кнопки: минуты плюс, минуты
минус, часы плюс, коррекция плюс. Коррекция подстройка значения
секунд раз в сутки в зависимости от суточного ухода показаний. Всё
заработало почти с первого раза. Нюанс: при замкнутой кнопке
сегмент, подключенный к той же ножке, оказывается включён, такой
вот побочный эффект, что поделать. Поэтому кнопки изменения минут
подключаю к выводам контроллера, которые управляют сегментами
единиц часов, а кнопки изменения часов подключаю к выводам
контроллера, которые управляют сегментами единиц минут. Выставляя
минуты, совсем не обращаешь внимания, что с показаниями часов
что-то не так, и наоборот.
Ну вот всё и получилось в макете с семисегментными индикаторами. Но
параллельно я пытался накопать информации по поводу применения ноги
сброса в качестве порта ввода-вывода. А там всё довольно туманно и
неопределённо. Основное, что об этом пишут: 1 выход с открытым
коллектором (не точно), 2 выход чрезвычайно слаботочный (тоже не
наверняка). Даже если использовать внешний транзистор, нужно точно
знать, открытый коллектор (сток) или нет, ведь тогда состояние
выхода нужно инвертировать. А перепрошить я уже не смогу. В общем,
опять двадцать пять! Вернее, двадцать один. Двадцать один
гарантированный выход вместо 22. Опять одного не хватает. Опять я
мечусь в поисках решения.
Возвращаюсь к AREF. Я могу получить три разных уровня на нём.
Значит можно зажечь один сегмент, или два одновременно, или ни
одного. Я обратился к своей же прошлой публикации (как давно это
было!):
Ненормативная схемотехника: семисегментный индикатор на
ATtiny13
Чтобы попробовать использовать решение с совместным включением двух
сегментов. Перебирая возможные пары сегментов, и осознавая, что
подобное усложнение портит всю картину, я внезапно додумался, что
для цифры десятков минут поле поиска значительно сужается цифра
ведь может быть только от 0 до 5. И тут пришло озарение:

во всех этих цифрах сегменты А и D или вместе светятся, или вместе
погашены! Не нужно никаких трёх состояний, достаточно просто
соединить сегменты А и D вместе и подключить к одному выходу. И
теперь 21 выхода хватит всем. Довожу код, проверяю на макетке с
семисегментным индикатором, бинго!
Всё, пора делать финальный вариант. Нарезаю светодиодную ленту,
наклеиваю сегменты на подходящее основание, которым оказался кусок
пластиковой вагонки (примерно 150х350 для цифр высотой 100). К
каждому сегменту нужно подвести +12 вольт и проводник от
соответствующего выхода контроллера.

В качестве монтажного провода применил для +12 тонкую проволочку
без изоляции, вынутую из обычного гибкого провода, подпаиваю к
плюсу каждого сегмента, продеваю через проколотое отверстие на
другую сторону основания и спаиваю их все вместе, а для остальных
проводников обмоточный провод в лаковой изоляции, продеваю их через
те же отверстия и подпаиваю к панельке контроллера. На каждую цифру
получилось по три отверстия в местах, где сходятся сегменты, в одно
отверстие выходит один провод на +12, и два или три провода в
изоляции. Также к контроллеру подведены четыре провода от кнопок,
кнопки замыкаются на минус, подтяжка внутренняя. Я при проверке
обходился без кнопок, просто касался провода проводом.

Сегменты цифр разведены по контроллеру именно в таком порядке для
упрощения кода.
Первая цифра (единица, напоминаю) состоит из цельного куска ленты
длиной 10 см. Подключаю 5 вольт питания контроллера и 12 вольт
питания индикации, включаю. Вот он, торжественный момент, всё
красиво светится, часики работают. Кстати, на КДПВ в начале статьи
в качестве светофильтра на индикаторах лежит лист обычной бумаги
для принтера, яркости хватает с избытком.
Мне не очень нравится американская система отображения времени,
когда часы дважды в сутки считают до двенадцати. Я применил свою: с
нуля часов до 19, и затем 8, 9, 10, 11. А с учётом того, что часы
офисные, в 8 вечера их редко кто увидит.

В такие моменты ощущаешь некоторое разочарование, что прям вот так
сразу заработало, даже как-то неинтересно. Поначалу я упорно не
хотел замечать некое мерцание индикаторов, пока мне на него не
указали коллеги. В макете этого мерцания не было видно совсем, а
тут прям бросается в глаза. Выше я писал, что при опросе кнопок
после перевода ножек в режим ввода сделана пауза в пару
миллисекунд, без этой паузы остаточный потенциал на ножке
воспринимался как нажатие. Так вот тих двух миллисекунд, в течение
которых индикаторы потушены, оказалось достаточно для мерцания
индикации. И это при том, что опрос происходит два раза в секунду.
То есть глаз замечает двухмиллисекундную паузу дважды в секунду,
чего я никак не ожидал. Было подозрение, что вследствие переходных
процессов контроллер каждый раз перепроверяет, действительно ли
нажаты кнопки (а это по 20 мсек на каждую). Я внёс некоторые
изменения в код, временно отключив все лишние функции, но
подозрения не подтвердились. В результате помогли следующие
изменения: для опроса кнопок перевожу те выходы, которые
задействованы под кнопки, в высокий уровень, тем самым погасив
соответствующие сегменты, только после этого перевожу те же ножки в
режим входа. Таким образом от паузы в 2 мсек можно избавиться
совсем, но я оставил на всякий случай 300 микросекунд, проблема
исчезла полностью.
Что мы имеем в итоге? Ножка сброса контроллера работает по прямому
назначению и используется только при заливке прошивки, ножки кварца
подключены к кварцу, как и положено. Двадцать ног работают как
порты ввода-вывода, и нога AREF управляет ключевым транзистором,
как раз на него и навешена цифра десятков часов (1). Ещё четыре
ножки питания, никто не отлынивает, все ноги задействованы. По
поводу кварца: я всерьёз рассматривал вариант применения часового
кварцевого резонатора на 32768 Гц (считал его более точным), но
отказался от идеи, побороздив интернет. Оказывается, запустить
Атмегу с часовым кварцем не так-то просто и нет никаких гарантий
работоспособности, а плюсов от применения не особо. Экономичность
нас не интересует в данном случае, основное потребление индикация.
С точностью тоже всё неопределённо. А суточный уход вполне
компенсируется программно. Зато большим плюсом является простота
подключения, кварц на 8 или 16 МГц без проблем работает даже без
конденсаторов. В результате вся схема состоит (если не считать
индикаторы и питание) из Атмеги, кварцевого резонатора, и
транзистора, припаянных прямо к панельке. Питание контроллера
обеспечивается малогабаритным стабилизатором из серии 7805, ток
через него мизерный, но на всякий случай я припаял его теплоотводом
к кусочку оцинковки примерно 30х30 мм. В целом же часы питаются от
внешнего блока питания на 12 вольт, который, по сути, дороже всех
комплектующих. Фактический ток потребления часов 560 мА при
показаниях часов 18-08 (это максимальное количество сегментов,
которые можно засветить одновременно), получается около 28 мА на
сегмент. Это при напряжении питания часов 11.7 вольт, ещё 0.3
вольта падает на диоде, включенном для защиты от неправильного
подключения и чтоб немного снизить напряжение и ток соответственно.
Падение на выходных ключах Атмеги около 0.56 вольт. Все токовые
режимы превышены, но Атмега справляется, честь и хвала творцам!
Запаса яркости избыточно, напряжение питания можно ещё снижать.
Если тактировать Атмегу от внутреннего генератора, то можно ножки
кварца отдать индикатору, а время считывать по I2C с DS1307. Опять
же будут заняты все ноги, но зато питание часов можно будет
отключать хоть на неделю, а время продолжит тикать. Хотя точность
DS1307 совсем не радует, и по моему опыту, и по отзывам в
интернете. Зато на ней есть дополнительный выход с открытым
коллектором, которому можно дать команду мигать с частотой 1 Гц, и
навесить на него разделительную точку. В моих часах разделительных
точек пока нет, можно разрезать ту же ленту на отдельные светодиоды
и подключить постоянно к напряжению питания. Мигать не будет, но я
думаю над этим. Может, кто подскажет, как выжать ещё каплю из
Атмеги?
И, напоследок, код для тех, кто захочет повторить. Компилировал и
прошивал в ArduinoIDE. Я не программер, так что примите как есть,
если кто предложит лучше, с удовольствием выложу.
Особо чувствительным не смотреть
Я предупреждал
bool Flag;uint8_t TimS;uint16_t TimH = 12; // время при включении 12-34uint16_t TimH_;uint16_t TimM = 34;uint16_t TimH0;uint16_t TimH1;uint16_t TimM0;uint16_t TimM1;uint16_t TimKorr = 7; // коррекия по умолчанию 7 - это 0 секунд, если 0 - это -28 сек, если 14 - это +28 сек// массив для цифрint semisegm_[10] = {B01011111, B00000110, B01101011, B01100111, B00110110, B01110101, B01111101, B00000111, B01111111, B01110111};void setup() { // PORTB = 0; PORTC = 0; PORTD = 0; // инициализация Timer1 cli(); // отключить глобальные прерывания TCCR1A = 0; // установить регистр в 0 TCCR1B = 0; // установить регистр в 0 // Таймер переполняeтся каждые 65535 отсчетов при коэффициенте деления 1024 или за 4,194с OCR1A = 62499; // установка регистра совпадения (4 секунд) TCCR1B |= (1 << WGM12); // включить CTC режим > сброс таймера по совпадению TCCR1B |= (1 << CS10); // Установить биты CS10 CS12 на коэффициент деления 1024 TCCR1B |= (1 << CS12); TIMSK |= (1 << OCIE1A); // для ATMEGA8 sei(); // включить глобальные прерывания} void loop() { if (TimM > 59) { TimM = 0; TimH++; Flag = 0; } if (TimH > 23)TimH = 0; if (TimM < 0) { TimM = 59; } if (TimH == 0) { if (TimM == 0) { if (TimS == 7) { if (Flag == 0) { TimS = TimKorr; Flag = 1; } } } } TimH_ = TimH; if (TimH > 19)TimH_ = TimH - 12; TimH0 = TimH_ / 10; TimH1 = TimH_ % 10; TimM0 = TimM / 10; TimM1 = TimM % 10; Led(TimH0, TimH1, TimM0, TimM1); Key();}// функция индикацииvoid Led(uint16_t TimH0, uint16_t TimH1, uint16_t TimM0, uint16_t TimM1) { DDRB = semisegm_[TimM1]; DDRC = semisegm_[TimM0]; DDRD = semisegm_[TimH1]; bitWrite(DDRD, 7, bitRead(semisegm_[TimM1], 6)); ADMUX = 199 * TimH0; // уровень 2.56 на AREF PORTB = 0; PORTC = 0; PORTD = 0; delay(500); // полсекунды просто отображаем время}// функция опроса кнопокvoid Key() { bitWrite(PORTB, 2, 1); bitWrite(PORTD, 2, 1); bitWrite(PORTD, 1, 1); bitWrite(PORTD, 0, 1); bitWrite(DDRB, 2, 0); bitWrite(DDRD, 2, 0); bitWrite(DDRD, 1, 0); bitWrite(DDRD, 0, 0); delayMicroseconds(300); if (bit_is_clear(PINB, 2)) { delay(20); if (bit_is_clear(PINB, 2)) { TimH++; } } if (bit_is_clear(PIND, 1)) { delay(20); if (bit_is_clear(PIND, 1)) { TimM++; } } if (bit_is_clear(PIND, 0)) { delay(20); if (bit_is_clear(PIND, 0)) { TimM--; } } if (bit_is_clear(PIND, 2)) { delay(20); if (bit_is_clear(PIND, 2)) { TimKorr++; if (TimKorr > 14)TimKorr = 0; Led(0, 8, TimKorr / 10, TimKorr % 10); delay(500); } }}ISR(TIMER1_COMPA_vect) // Выполняем 1 раз в 4 секунды.{ TimS++; if (TimS > 14) { TimM++; TimS = 0; }}





















































































 Arduino vs CANNY перетягивание диода
Arduino vs CANNY перетягивание диода
 Схема соединений
Схема соединений
 Фото
схемы
Фото
схемы
 Функциональная диаграмма
Функциональная диаграмма
 Составной блок
Составной блок
 Различные варианты поданного на СИД напряжения
Различные варианты поданного на СИД напряжения
 Монитор COM-порта
Монитор COM-порта

 Рисунок
A
Рисунок
A
 Рисунок
Б
Рисунок
Б
 Рисунок
В
Рисунок
В
 Рисунок
Г
Рисунок
Г Рисунок
Д
Рисунок
Д Рисунок
Е
Рисунок
Е

























 Дисплеи под ардуино
Дисплеи под ардуино




 fig:
fig:







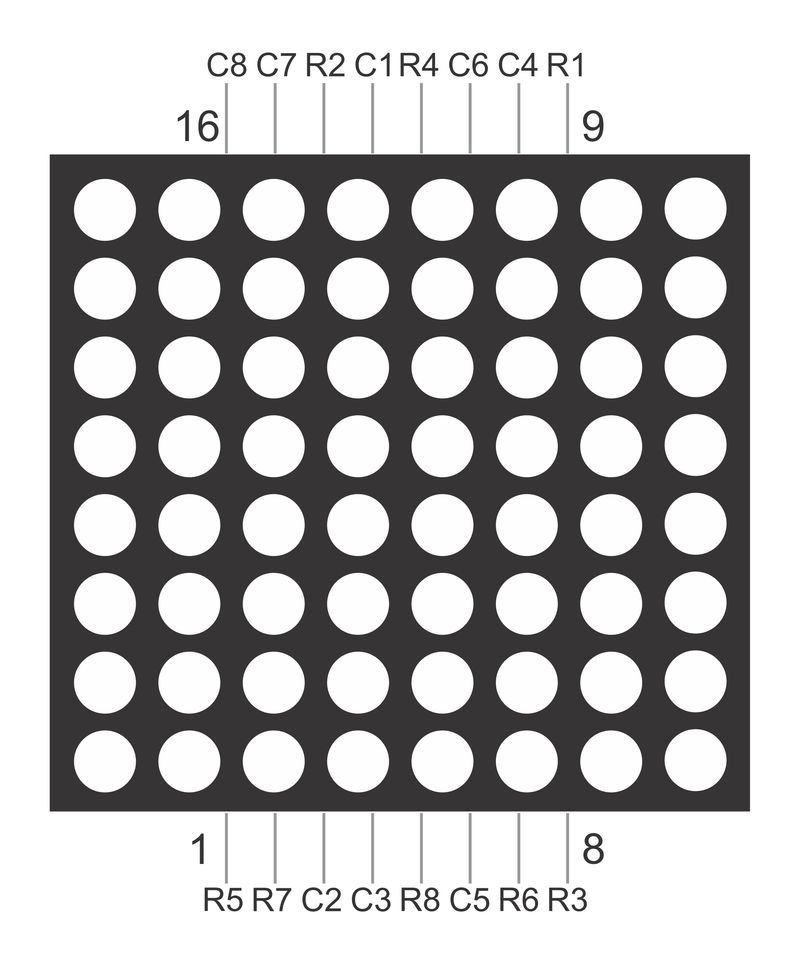
 Это не моя картинка, но подключал я по
этой схеме на те же пины с поправкой на их другое расположение в
нано
Это не моя картинка, но подключал я по
этой схеме на те же пины с поправкой на их другое расположение в
нано


































 QUARK
QUARK
 Вольтметер
Вольтметер
 Амперметер
Амперметер
 Сопротивление
Сопротивление

 Осциллограф
Осциллограф

